

理解Planing2.0 参数配置
planning2.0配置参数新开发模式
Apollo提供了丰富的功能和业务逻辑,涵盖了多种自动驾驶场景和应用。许多常见的使用场景在Apollo中已经得到满足,因此对于某些应用来说,无需进行额外的开发工作,仅通过调整规划模块的配置参数即可实现所需功能。
当apollo的现有功能和业务逻辑完全适用于您的使用场景时,例如,您只希望点到点行驶调整巡航速度,或者过转弯时期望速度更低,您可以不需要开发代码,只通过调整规划模块配置参数实现场景的功能需求。
但是planning中的配置参数量较大,入门调试时难度较高,用户想要修改的功能对应的参数不直观,并且不易快速定位需要修改的参数位置。
针对这些问题,对配置参数目录进行了以下调整:
- 将参数分成全局变量和局部变量,全局变量是多个算法或插件中共同使用的参数;局部变量是专属于某个算法或插件的参数。如果用户需要调整某个插件的参数,直接在插件的目录中查找。
- 添加对常用功能使用到的参数的说明文档,方便用户调试时查询。
对参数目录进行重新梳理和作用范围的划分,有以下优点:
- 参数的目录跟随作用范围和功能,这样对参数的定位更清晰和直观。
planning2.0对配置参数新增功能:
- 用户新增的插件所使用的参数,可以跟随插件进行发布和管理。
- 优化代码跳转功能
- 同时引入了一个profile的配置参数插件,用户可以使用这个profile插件,将配置参数放在该目录中,在profiles目录下,用户都可以定义一到多份配置参数,并可以使用aem工具对查看和管理配置参数。
planning2.0相关云实验
实验一:Apollo规划之减速带配置仿真实践
https://apollo.baidu.com/community/course/23
实验二:Apollo规划之交通灯场景仿真调试
https://apollo.baidu.com/community/course/9
实验三:Apollo规划之借道绕行仿真调试
https://apollo.baidu.com/community/course/7
1、配置参数综述
在Apollo的planning2.0中,我们对配置参数进行了重要的更新,以提高系统的灵活性和适用性。以下是更新的主要内容:
- 配置参数拆分:我们对1.0版本的配置参数进行了细分,将原本的配置参数拆分成了两大类:全局参数(planning_base)和局部参数(scenarios、tasks、traffic_rules)。全局参数包含了规划模块的基本参数设置,而局部参数则针对不同的场景和任务进行了特定的配置。
- 多份配置参数切换:为了适应不同的应用需求,我们引入了多份配置参数切换方式。用户都可以定义一到多份配置参数,以满足不同的场景和任务要求。
planning参数配置分为全局参数和局部参数,全局参数是在planning基本流程和基础算法中使用的参数,在planning_base文件夹中定义和配置,包含gflag和protobuf两种文件配置方式;局部参数是在planning的插件中定义和配置的,它只作用于所属的插件。
配置参数分类如下:
经过修改后的配置参数文件目录可以分为:全局配置参数和局部配置参数。无论是全局还局部配置参数,它们的配置目录都可以分为两类:一类是采用proto文件进行定义,用于定义配置参数的数据结构;另一类是采用conf文件进行配置,用于包含实际的配置参数。
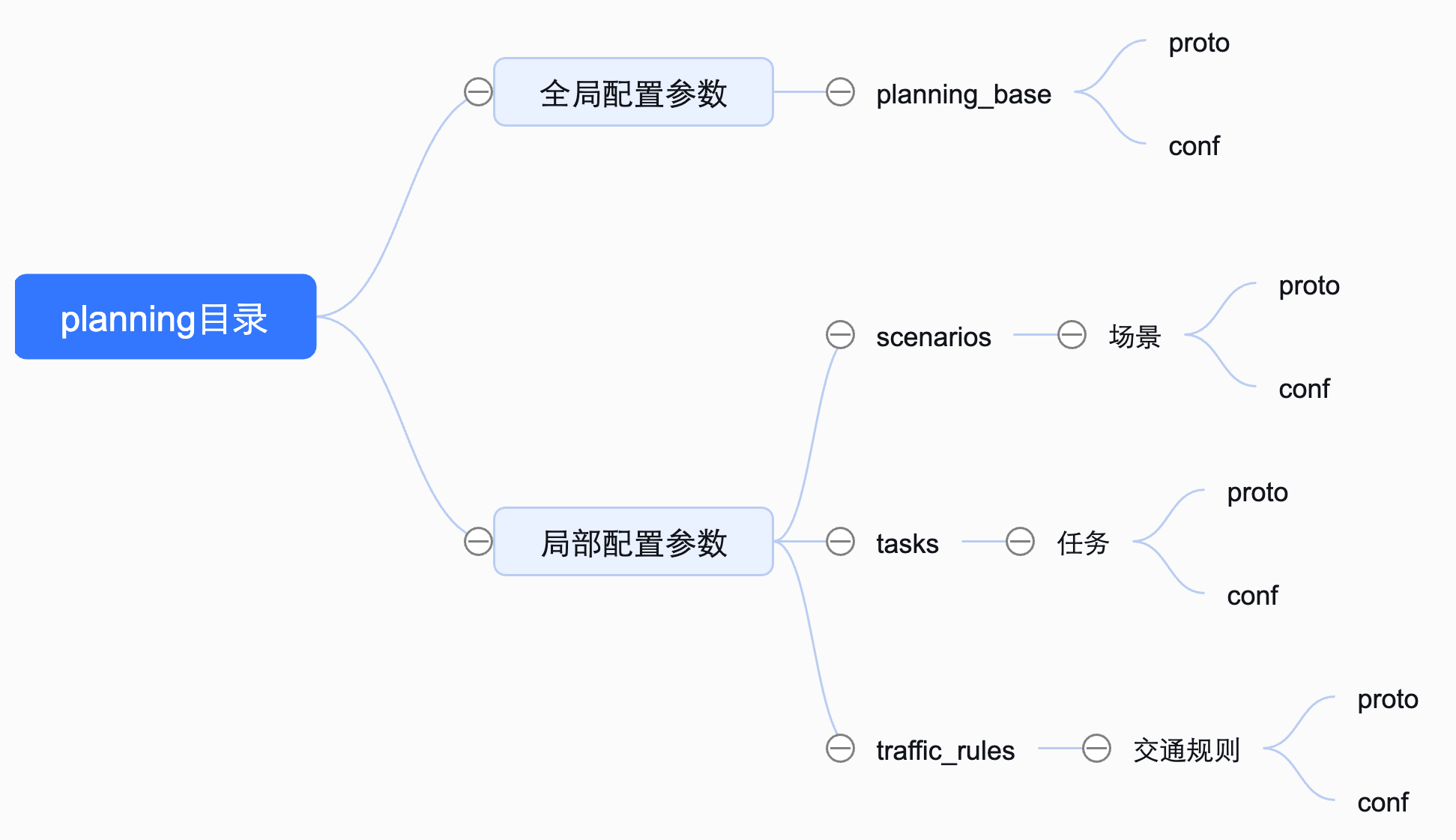
planning参数配置的结构如下:
全局配置参数:
全局配置参数 | 文件目录结构 | 文件 | |
planning_base | proto | planning_config.proto | planing全局配置参数定义 |
traffic_rule_config.proto | traffic_rule生效列表配置定义 | ||
其他基础算法配置参数.proto | 其他算法配置参数定义 | ||
conf | planning.conf | 全局flag变量 | |
planning_config.pb.txt | planning全局配置参数 | ||
traffic_rule_config.pb.txt | 选择traffic_rule生成列表 | ||
其他基础算法配置参数.pb.txt | 其他算法配置参数定义 | ||
common | planning_gflags.h | 全局flag变量定义 | |
scenario_base | proto/scenario_pipeline.proto | scenaro的pipeline定义 |
局部配置参数scenarios:
局部配置参数 | 场景 | 文件目录结构 | |||
scenarios | park_and_go | proto | park_and_go.proto | Scenario:park_and_go scenario的配置参数定义 | |
conf | pipeline.pb.txt | Scenario Pipeline :park_and_go scenario的PiPeline参数配置 | |||
scenario_conf.pb.txt | Scenario :park_and_go scenario的配置参数 | ||||
park_and_go_adjust Stage目录: park_and_go just stage的task配置参数 | open_space_roi_decider.pb.txt | Task:open_space_roi_decider task的配置参数 | |||
open_space_trajectory_provider.pb.txt | Task:open_space_trajectory_provider的配置参数 | ||||
park_and_go_check Stage目录:park_and_go_check stage的task配置参数 | open_space_roi_decider.pb.txt | Task:open_space_roi_decider task的配置参数 | |||
lane_follow | proto | ||||
conf | |||||
bare_intersection_unprotected | proto | ||||
conf | |||||
… |
局部配置参数tasks:
局部配置参数 | 场景 | 文件目录结构 | ||
tasks | lane_borrow_path task默认配置 | proto | lane_borrow_path.proto | lane_borrow_path task的配置参数定义 |
conf | default_conf.pb.txt | lane_borrow_path task的配置参数 | ||
open_space_roi_decider task默认配置 | proto | |||
conf | ||||
path_decider task默认配置 | proto | |||
conf | ||||
… |
局部配置参数traffic_rules:
局部配置参数 | 场景 | |||
traffic_rules | baskside_vehicle task默认配置 | proto | backside_vihicle.proto | backside_vihicle的配置参数定义 |
conf | default_conf.pb.txt | backside_vihicle的配置参数 | ||
crosswalk task默认配置 | proto | |||
conf | ||||
keepclear task默认配置 | proto | |||
conf | ||||
… |
2、Planing_base参数配置
Planing_base:全局配置参数
2.1 概述
全局配置参数,是指会参与规划上所有内容的参数。这些参数对整个规划过程起着全局性的影响,它们决定了规划模块的基本行为和策略。全局配置参数在整个规划系统中是通用的,不会因为不同的场景或任务而变化,因此它们适用于所有的规划任务。
对应的配置文件在“modules/planning/planning_base/conf/planning.conf”中:
navi模式
对应的配置文件在“modules/planning/planning_base/conf/planning_navi.conf”中:
2.2 配置流程

开发者如果对配置参数有特定的修改要求,只需输入同步指令,系统将自动将全局配置参数复制到profile的default目录中,然后就可以在profile目录上轻松修改配置参数。
buildtool profile config init --package planning --profile=default
使用default目录这份配置
# 使用名字叫default的这份配置aem profile use default
profile插件目录结构
profiles/default/modules/planning/planning_base/|-- conf| |-- discrete_points_smoother_config.pb.txt| |-- planner_open_space_config.pb.txt| |-- planning.conf| |-- planning_config.pb.txt| |-- planning_config_navi.pb.txt| |-- planning_navi.conf| |-- planning_semantic_map_config.pb.txt| |-- qp_spline_smoother_config.pb.txt| |-- spiral_smoother_config.pb.txt| `-- traffic_rule_config.pb.txt|-- dag|-- launch`-- testdata
2.3 实践
全局配置参数对车辆规划的影响
在这个实践案例中,我们将通过调整不同的配置参数,探索全局配置参数对车辆速度规划、减速带处理以及绕行距离规划的影响。我们将使用planning2.0来进行参数配置和规划,并通过Apollo的dreamview来观察车辆规划的效果。
实践内容:
- 全局速度配置实践:
- 目标:调整全局配置参数,使得车辆的最高行驶速度不超过10m/s。
- 方法:在planning2.0中修改全局速度配置参数。
- 结果:在dreamview上实时查看车辆规划的速度情况,验证是否符合要求。
- 减速带配置实践:
- 目标:调整全局配置参数,使得车辆通过减速带时的最高行驶速度不超过4m/s。
- 方法:在planning2.0中设定不同的减速带配置参数。
- 结果:通过dreamview实时观察车辆的规划路径和速度情况,验证是否满足要求。
- 绕行距离配置实践:
- 目标:调整全局配置参数,使得车辆在遇到障碍物时与障碍物保持1.0m的距离。
- 方法:在planning2.0中改变绕行距离配置参数。
- 结果:在dreamview上实时查看车辆绕行的路径和与障碍物的距离,验证是否符合要求。
实践目的:
探索全局配置参数对车辆规划的影响。将关注全局速度配置、减速带配置以及绕行距离配置,分别观察车辆规划速度、减速带处理和绕行路径规划的效果。
实践流程:
- 默认配置参数规划效果
- 启动dreamview并观察默认配置参数下车辆速度规划、减速带处理以及绕行距离规划的仿真效果
- 使用planning2.0仿真:https://apollo.baidu.com/community/article/1116
- 全局速度配置实践:
- a. 找到planning2.0中全局速度配置的相关文件。
- b. 根据要求,调整全局速度配置参数,确保车辆的最高行驶速度不超过10m/s。
- c. 保存修改后的配置参数,并重新启动planning
- 模块。
- d. 运行车辆规划模块,并在dreamview上观察车辆规划速度的变化。
- 减速带配置实践:
- a. 找到planning2.0中减速带配置的相关文件。
- b. 设定不同的减速带配置参数,确保车辆通过减速带时的最高行驶速度不超过4m/s。
- c. 保存修改后的配置参数,并重新编译planning2.0模块。
- d. 运行车辆规划模块,并在dreamview上实时观察车辆遇到减速带时的通行速度和规划路径。
绕行距离配置实践:
- a. 寻找planning2.0中绕行距离配置的相关文件。
- b. 改变绕行距离配置参数,确保车辆在遇到障碍物时与障碍物保持1.0m的距离。
- c. 保存修改后的配置参数,并重新编译planning2.0模块。
- d. 运行车辆规划模块,并在dreamview上实时查看车辆绕行的路径和与障碍物的距离。
2.3.1.1默认配置参数规划效果
全局速度配置实践:
相关云实验:Apollo规划之减速带配置仿真实践
https://apollo.baidu.com/community/course/23
启动dreamview后,选取这三个场景进行仿真依次进行仿真。
2.3.1.2全局速度配置实践:
在全局配置参数中找到该全局速度的配置参数:
--default_cruise_speed=1.5
将配置参数的值修改为:
--default_cruise_speed=10.0
修改之后保存代码后进行仿真。
实验现象:
原始 | 修改后 | |
全局速度配置实践 | 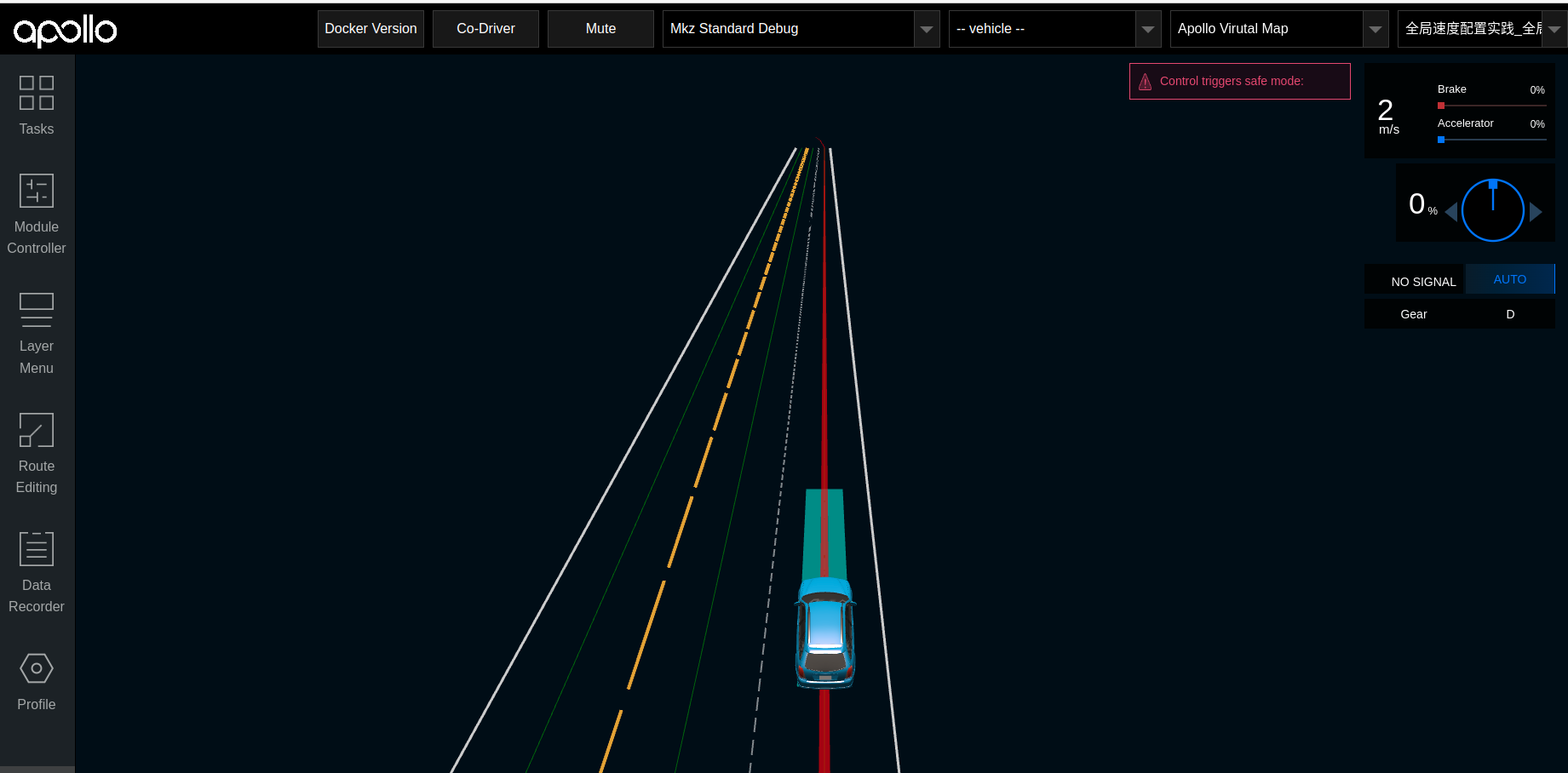 | 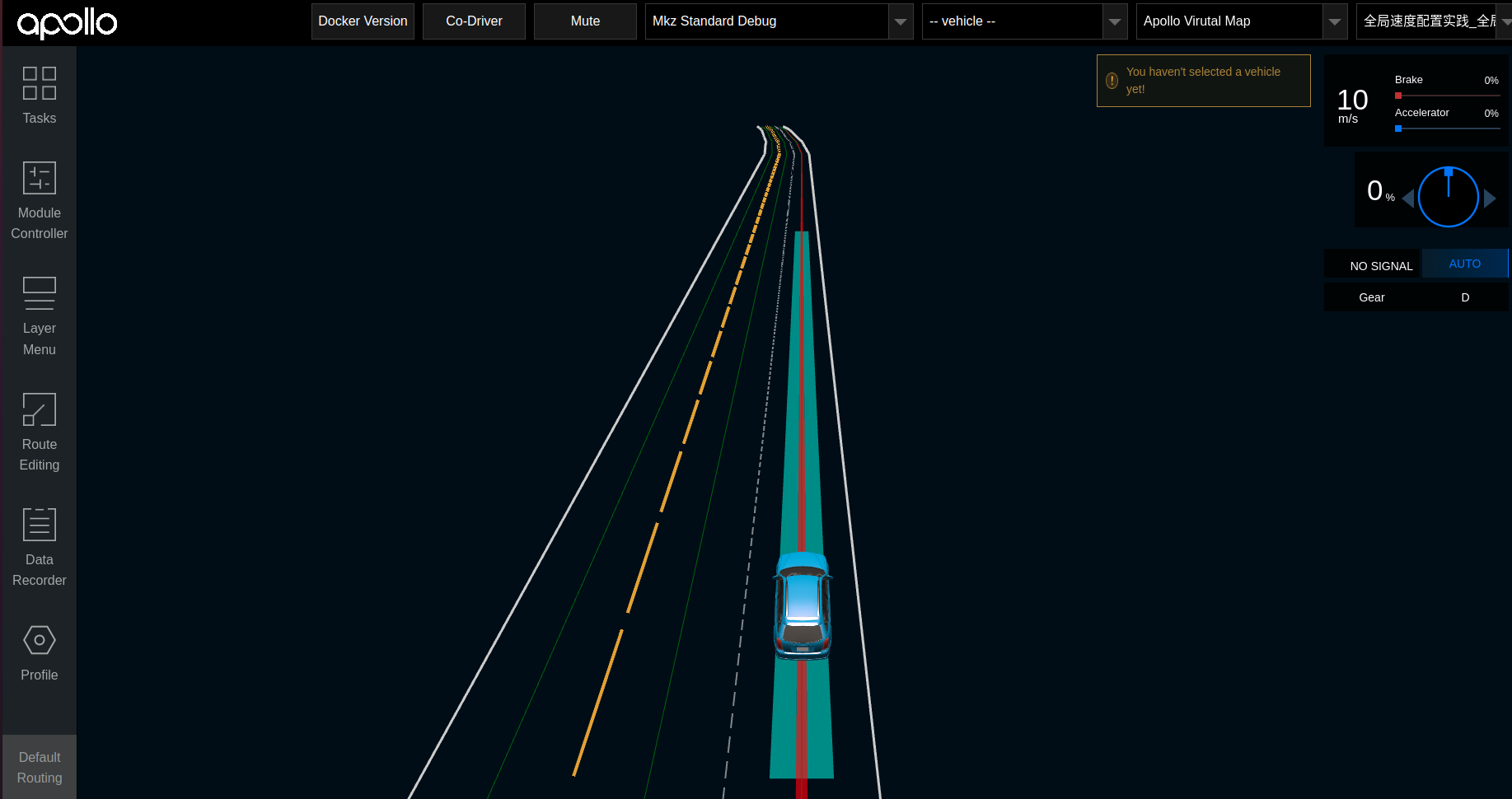 |
2.3.1.3减速带配置实践:
减速带配置实践:
相关云实验:Apollo规划之减速带配置仿真实践
https://apollo.baidu.com/community/course/23
将speed_bump_speed_limit 参数添加至全局配置参数中。
--speed_bump_speed_limit=1.5
将配置参数的值修改为:
--speed_bump_speed_limit=4.0
修改之后保存代码后进行仿真。
实验现象:
原始 | 修改后 | |
减速带配置实践 | 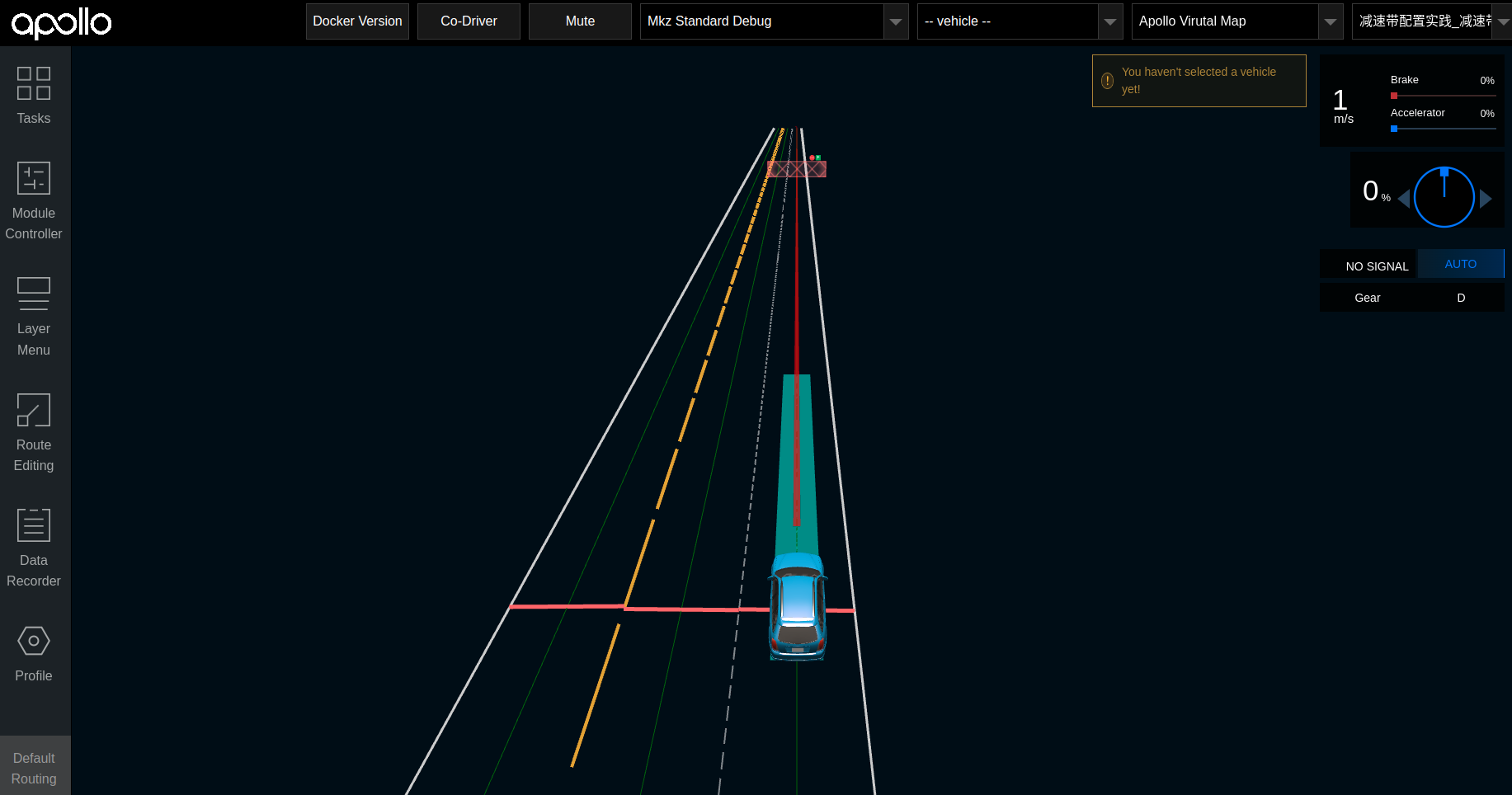 | 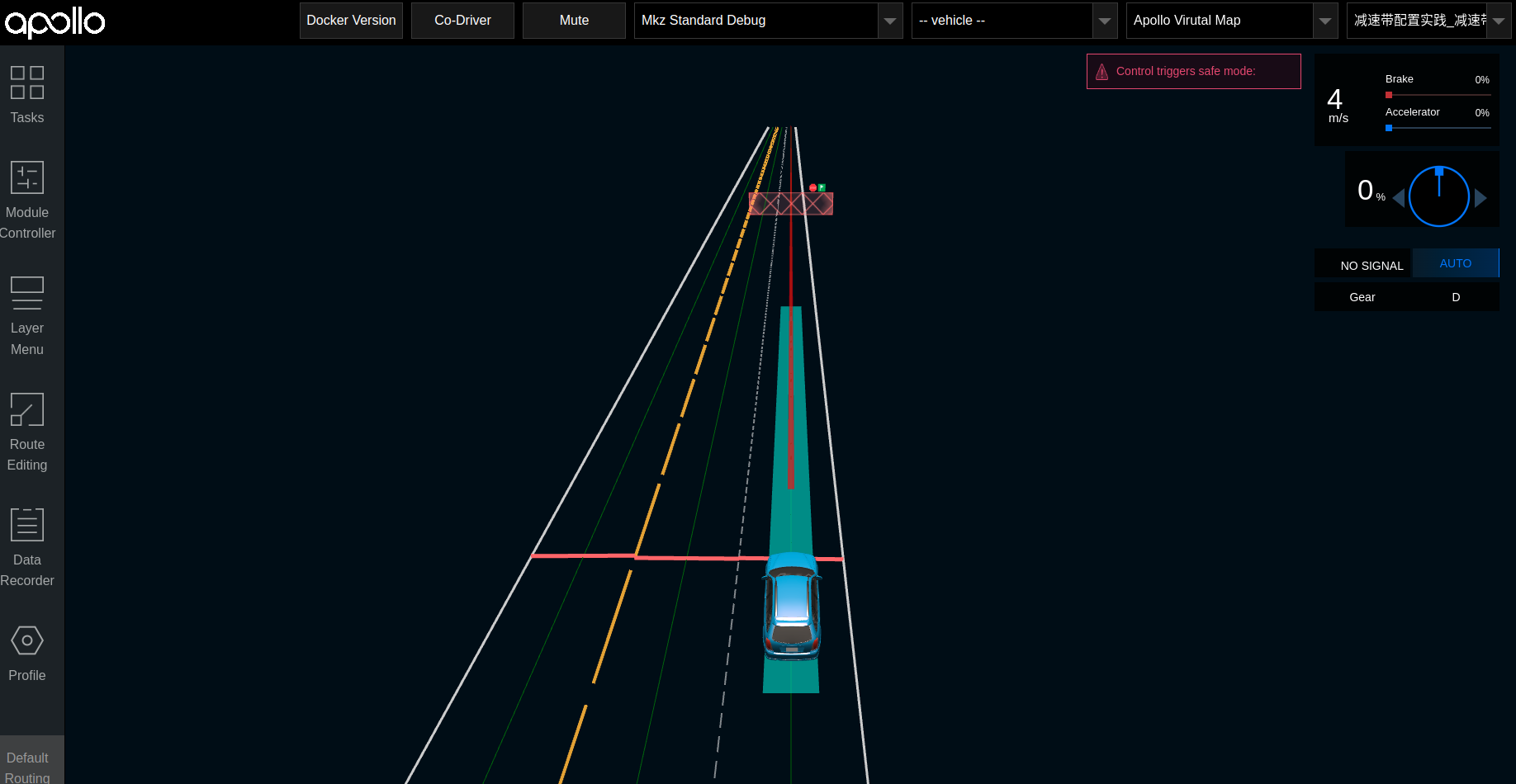 |
2.3.1.4绕行距离配置实践:
绕行距离配置实践:
planning2.0相关云实验:Apollo规划之借道绕行仿真调试
https://apollo.baidu.com/community/course/7
全局配置参数中找到减速带配置参数
--obstacle_lat_buffer=0.3
将配置参数的值修改为:
--obstacle_lat_buffer=1.0
修改之后保存代码后进行仿真
原始 | 修改后 | |
绕行距离配置实践 |  |  |
3、traffic rules参数配置
traffic rules:局部配置参数
3.1 概述
traffic rules实现了在所有场景下都会生效的规则,用户可以根据自己的需求,决定启用哪些traffic rules,对应的配置文件在“modules/planning/planning_base/conf/traffic_rule_config.pb.txt”中:
rule {name: "BACKSIDE_VEHICLE"type: "BacksideVehicle"}rule {name: "CROSSWALK"type: "Crosswalk"}rule {name: "DESTINATION"type: "Destination"}rule {name: "KEEP_CLEAR"type: "KeepClear"}rule {name: "STOP_SIGN"type: "StopSign"}
rule中的“name”为场景的别名,用户可以自定义,使用大写字母命名;“type”是对应场景插件类的类名,省略namespace apollo::planning。
对于每一个交通规则,还有其自己的交通规则参数,位于交通规则插件的conf目录内。比如人行道规则参数位于modules/planning/traffic_rules/crosswalk/conf/default_conf.pb.txt
stop_distance: 1.0max_stop_deceleration: 4.0min_pass_s_distance: 1.0expand_s_distance: 2.0stop_strict_l_distance: 4.0stop_loose_l_distance: 5.0start_watch_timer_distance:10stop_timeout: 10.0
3.2 配置流程

开发者如果对配置参数有特定的修改要求,只需输入同步指令,系统将自动将全局配置参数复制到profile的default目录中,然后就可以在profile目录上轻松修改配置参数。
buildtool profile config init --package planning-traffic-rules-traffic-light --profile=default
查看profile插件目录结构:
tree profiles/default/modules/planning/traffic_rules/
目录结构:
profiles/default/modules/planning/traffic_rules/`-- traffic_light`-- conf`-- default_conf.pb.txt
3.3 实践案例
3.3.1Traffic Rules配置参数对车辆规划的影响:
在这个实践案例中,我们将通过调整不同的配置参数,探索Traffic Rules配置参数对车辆遇到红绿灯时的停车距离的影响。我们将使用planning2.0来进行参数配置和规划,并通过Apollo的Dreamview来观察车辆规划的效果。
实践内容:
局部配置参数交通灯场景配置实践
- 目标:通过调整Traffic Rules配置参数,使得主车在监测到前方为红灯时,能够准确停车在距离停止线2米至2.5米的位置,不得超过停止线。当交通灯变为绿色后,主车能够顺利通过红绿灯路口。
- 方法:在planning2.0中找到Traffic Rules配置的相关文件,并调整配置参数,以满足红绿灯场景的要求。
- 结果:在Apollo的Dreamview仿真环境中,观察主车在红绿灯场景下的行驶情况,验证是否能够在红灯时停车在合适位置,并在绿灯后通过红绿灯路口。
实践目的:
探索Traffic Rules配置参数对车辆规划的影响。观察车辆在不同情况下的停车行为,并探索如何优化交通规则处理模块,以实现更精确和安全的车辆规划。
实践流程:
- 默认配置参数规划效果
- 启动dreamview并观察默认配置参数下车辆遇到交通灯的仿真效果。
- 使用planning2.0仿真:https://apollo.baidu.com/community/article/1116
- 红绿灯场景实践:
- a. 找到planning2.0中Traffic Rules配置的相关文件。
- b. 根据要求,调整Traffic Rules配置参数,确保车辆停车在距离停止线2米至2.5米的位置停车。
- c. 保存修改后的配置参数,并重新启动planning模块。
- d. 运行车辆规划模块,并在dreamview上观察车辆遇到红绿灯场景的停车变化。
3.3.1.1 红绿灯场景实践配置参数修改
红绿灯场景配置实践:
planning2.0相关云实验:Apollo规划之交通灯场景仿真调试
https://apollo.baidu.com/community/course/9
在Traffic Rules参数中找到交通灯停止距离的配置参数
stop_distance: 1.0
将默认配置参数修改成
stop_distance: 2.0
仿真对比:
原始 | 修改后 | |
绕行距离配置实践 | 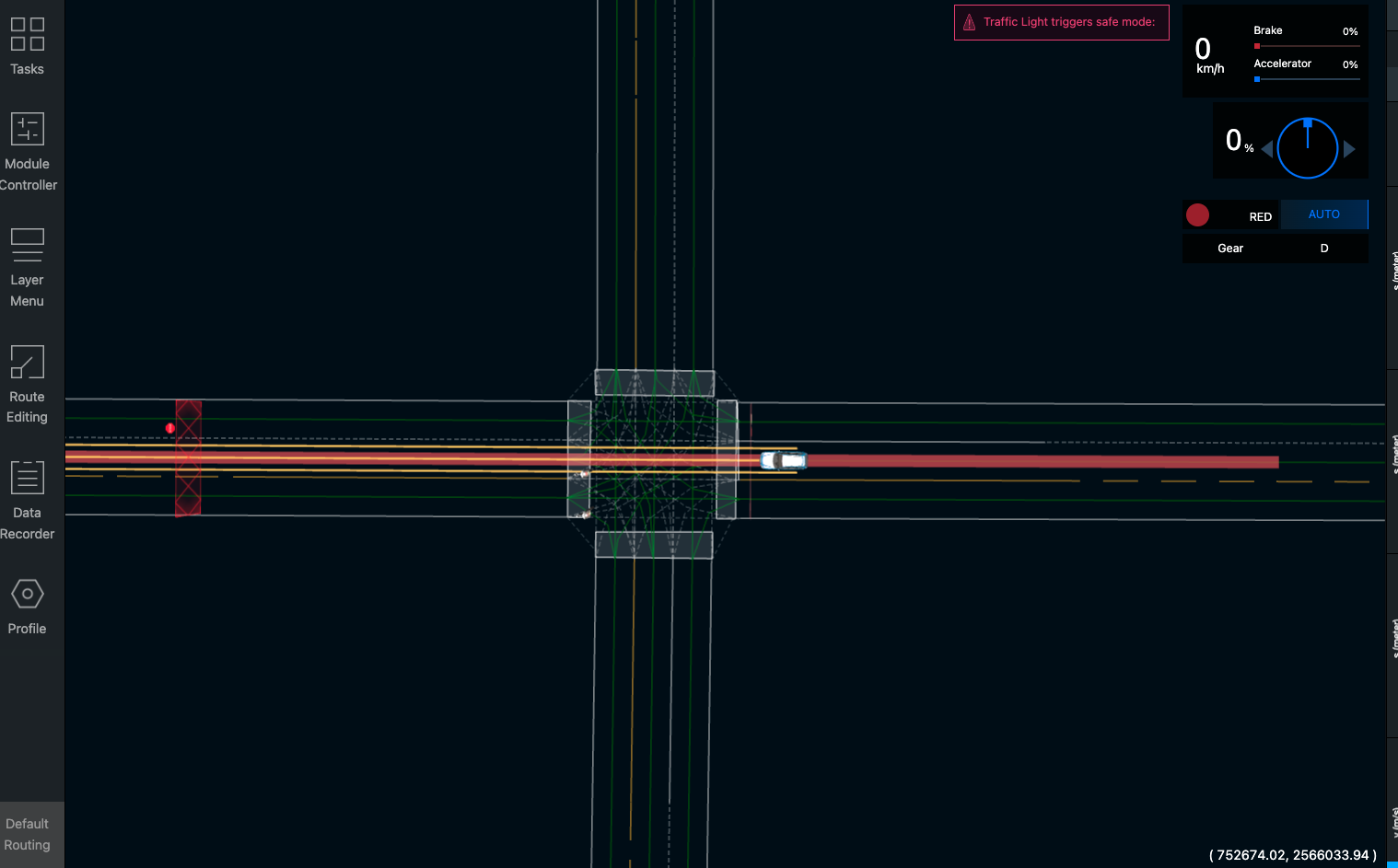 | 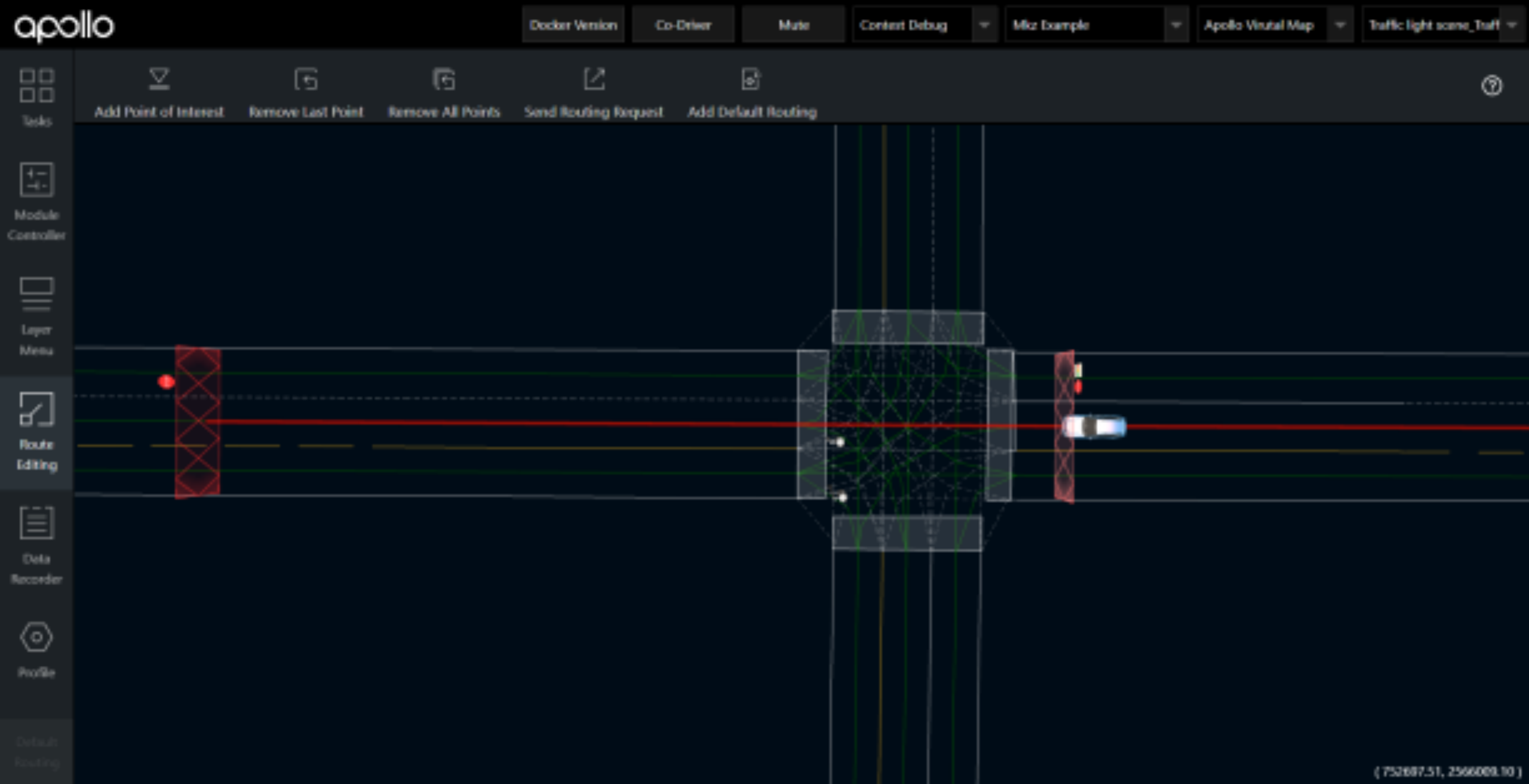 |
4、planning2.0配置文件新功能
在Apollo的planning2.0中,为了解决不同场景下可能需要对同一模块使用不同配置参数的问题,我们引入了profiles目录,并提供了使用aem工具来查看和使用profile配置文件的功能。
在profiles目录下,用户可以定义一到多份配置参数,以适应不同的应用场景。通过使用aem命令,我们可以轻松地查看已有的profile,并在不同场景下切换使用不同的配置参数。这为我们快速切换配置提供了便利,以验证不同参数对系统性能和效果的影响,从而优化规划模块的表现。
profile工作原理如下:
在planning2.0中,我们将配置参数分为了两大类,分别为全局配置参数(组件)和局部配置参数(插件)。
在读取配置参数时,其优先级如下:
组件:profile > 默认,后续会改为工作空间源码 > profile > 默认
插件:工作空间源码 > profile > 默认
关于profile:
在默认情况下,profile目录是空的,不包含任何配置参数,profile软链会优先使用编译产出后的配置参数。想将其他配置参数添加到profile目录中,需要输入同步指令,将配置参数复制到profile目录下。
通过执行同步指令,将在profile目录中看到与默认配置参数相同的文件。另外,如果希望切换不同的配置参数,可以通过输入切换指令来实现,这会改变软链的指向,从而选择不同的配置文件。
关于工作空间源码:
这里所谓的“工作空间源码”指的是工作目录下的modules文件夹中包含了该份代码的配置参数。这意味着系统会优先读取工作目录中的源码配置参数,以确保在配置参数的选择过程中具有更高的灵活性和个性化定制性。通过这一机制,我们可以更加灵活地适应不同的应用需求,从而提升系统的适应性和性能。
以下是aem指令用于查看和切换配置参数:
buildtool profile config init# 查看已有的profileaem profile list# 使用名字叫default的这份配置aem profile use default
在profiles目录下,用户可以定义一到多份配置参数。这样的好处在于
- 场景适配性:通过根据不同的场景设置不同的配置参数,我们可以轻松地适应各种应用场景。不同的任务、环境或需求可能需要不同的配置,这样的灵活性能够提高系统的适应性和性能表现。
- 参数保存和复用:在调参过程中,我们可以将认为比较好的参数保存在一个文件夹中。这样,我们不仅能够方便地复用之前优化过的参数,还能够在之后的调参过程中避免遗忘或丢失重要的设置,提高了工作效率。
- 快速回滚:通过保存各个版本的配置文件,如果在后续调整参数时发现新的配置不如之前的好,我们可以轻松地将代码切换回之前保存的较为完美的配置文件。这样能够迅速回滚到之前的状态,避免不必要的错误或性能下降。
- 团队协作:当多个团队成员共同参与项目时,可以为每个成员创建独立的配置文件,便于个人调试和优化,而不会干扰其他人的工作。这种方式有助于提高团队协作效率,各成员可以专注于自己的任务而不用担心影响他人。
4.1多份配置参数切换方式
在Apollo的planning2.0中,我们引入了多份配置参数切换方式,使得根据不同的场景使用不同的配置成为可能,以适应各种应用需求。下面将详细介绍如何设置参数目录:
4.1.1参数设置目录设置
首先,进入docker工作空间,在/apollo_workspace路径下输入以下配置参数指令,将配置参数复制到profile插件目录中。
注意:默认情况下,配置参数使用的是
示例指令,查看已有的profile配置指令:
# 查看已有的profileaem profile list
profile插件的配置文件目录
default demo_1 demo_2
在这个例子中,通过执行以下指令,我们可以查看当前使用的配置为"default"这份配置文件,并查看profiles目录的结构:
tree profiles
profile目录结构:
profiles/├── current -> default #软链├── default├── demo_1└── demo_2
通过使用以下命令,我们可以轻松切换到名为"demo_1"的配置参数:
# 使用名字叫default的这份配置aem profile use demo_1
这样的做法十分便捷,不需要手动处理所有配置文件,只需关注需要修改的部分,系统会智能地处理其余配置,确保我们能够快速调整参数并保持系统正常运行。这样的配置管理方式有效地提高了工作效率和代码的可维护性,让调参过程更加简洁和灵活。
