【实践】基于插件进行开发
感知插件开发
本次实践课的目标是开发一个插件,说明感知插件开发的过程。插件二次开发的重点是代码框架搭建和配置管理。本次插件开发实现一个示例功能:过滤障碍物,fp_filter。此插件用于过滤误检目标。这里把一些尺寸不合理、置信度较低的目标作为误检目标。
准备工作
环境配置:CCF-赛事感知(Perception)环境配置
激光雷达感知参数说明:激光雷达感知参数说明
# 进入到application-perception代码库cd application-perception# 拉取并启动docker容器,如果已拉取不需要执行这条命令aem start_gpu# 进入容器aem enter# 下载安装依赖包: 会拉取安装core目录下的cyberfile.xml里面所有的依赖包buildtool build --gpu
插件的创建通过命令的形式来实现,执行命令后代码框架被自动创建。
创建插件
在容器内,执行命令创建插件。fp_filter的含义是false positive filter,用于过滤误检目标。
#创建插件,--namespace说明命名空间,--template说明创建的是插件,最后是插件的路径buildtool create --namespace perception --template plugin modules/perception/fp_filter
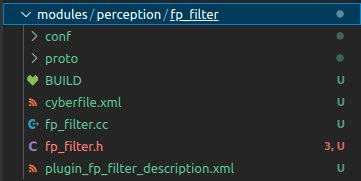
插件创建成功后的代码结构:
插件开发
此插件应用于lidar_detection_filter,生成的插件有默认的配置,需要做修改和开发。
代码修改
- 在cyberfile.xml中增加perception-lidar-detection-filter包依赖
<depend repo_name="perception-lidar-detection-filter" type="binary">perception-lidar-detection-filter</depend>
- 修改代码
在头文件 fp_filter.h 修改代码。其中需要修改的地方以注释的形式做了说明。
#pragma once#include <memory>#include "cyber/plugin_manager/plugin_manager.h"#include "modules/perception/lidar_detection_filter/interface/base_object_filter.h" // 0.添加头文件namespace apollo {namespace perception {namespace lidar { // 1.定义命名空间class FpFilter : public BaseObjectFilter { // 2.继承基类public:FpFilter() = default; // 3.定义构造和析构函数virtual ~FpFilter() = default;public:// 4.重写如下三个函数; 声明 FilterFlag 方法bool Init(const ObjectFilterInitOptions& options = ObjectFilterInitOptions()) override;bool Filter(const ObjectFilterOptions& options, LidarFrame* frame) override;std::string Name() const override {return "FalsePositiveFilter";}bool FilterFlag(base::ObjectPtr obj, double confidence_thresh, double volume_thresh, double height_diff_thresh);private:std::vector<bool> fp_flag_; // 5.定义数据结构};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::perception::lidar::FpFilter, BaseObjectFilter) // 6.修改插件配置} // namespace lidar} // namespace perception} // namespace apollo
- 在plugin_fp_filter_description.xml中修改配置
<library path="modules/perception/fp_filter/libfp_filter.so"><class type="apollo::perception::lidar::FpFilter" base_class="apollo::perception::lidar::BaseObjectFilter"></class></library>
- 在BUILD中增加依赖项
apollo_plugin(name = "libfp_filter.so",srcs = ["fp_filter.cc",],hdrs = ["fp_filter.h",],description = ":plugin_fp_filter_description.xml",deps = ["//cyber","//modules/perception/fp_filter/proto:fp_filter_proto","//modules/perception/lidar_detection_filter:apollo_perception_lidar_detection_filter", # 增加依赖项],)
功能定义
修改好了头文件和插件配置。在 fp_filter.cc 中定义代码功能。功能核心点如下:
- 过滤规则:置信度低、体积小、高度差小的目标做误检过滤;
- 过滤目标类别:UNKNOWN、UNKNOWN_MOVABLE、UNKNOWN_UNMOVABLE、BICYCLE、PEDESTRIAN;
#include <memory>#include "modules/perception/fp_filter/fp_filter.h"namespace apollo {namespace perception {namespace lidar {bool FpFilter::Init(const ObjectFilterInitOptions& options) {fp_flag_.clear();return true;}bool FpFilter::Filter(const ObjectFilterOptions& options, LidarFrame* frame) {if (!frame) {AINFO << "Lidar frame is nullptr.";return false;}fp_flag_.clear();size_t size = frame->segmented_objects.size();fp_flag_.assign(size, false); // filter object if true// 除了vehicle,对其他类别的目标做误检过滤for (size_t i = 0; i < size; ++i) {base::ObjectPtr obj = frame->segmented_objects.at(i);base::ObjectType type = obj->type;if (type == base::ObjectType::UNKNOWN || type == base::ObjectType::UNKNOWN_MOVABLE|| type == base::ObjectType::UNKNOWN_UNMOVABLE) {fp_flag_.at(i) = FilterFlag(obj, 0.4, 0.3, 0.3);} else if (type == base::ObjectType::BICYCLE) {fp_flag_.at(i) = FilterFlag(obj, 0.4, 0.4, 0.8);} else if (type == base::ObjectType::PEDESTRIAN) {fp_flag_.at(i) = FilterFlag(obj, 0.4, 0.3, 1.0);}}// do filtersize_t valid_num = 0;for (size_t i = 0; i < fp_flag_.size(); ++i) {base::ObjectPtr obj = frame->segmented_objects.at(i);if (!fp_flag_.at(i)) {frame->segmented_objects.at(valid_num) = obj;valid_num++;}}frame->segmented_objects.resize(valid_num);AINFO << "FalsePositiveFilter, filter fp " << size - valid_num << " objects, from " << size << " objects";return true;}/*** @brief** @param obj* @param confidence_thresh 过滤置信度较低的目标* @param volume_thresh 过滤体积较小的目标* @param height_diff_thresh 过滤* @return true* @return false*/bool FpFilter::FilterFlag(base::ObjectPtr obj,double confidence_thresh,double volume_thresh,double height_diff_thresh) {// confidenceif (obj->confidence < confidence_thresh) {return true;}// volumeauto obj_size = obj->size;double volume = obj_size[0] * obj_size[1] * obj_size[2];if (volume < volume_thresh) {return true;}// height diffdouble max_z = -10000.0;double min_z = 10000.0;for (size_t i = 0; i < obj->lidar_supplement.cloud.size(); ++i) {double val_z = obj->lidar_supplement.cloud[i].z;max_z = std::max(max_z, val_z);min_z = std::min(min_z, val_z);}double height_diff = max_z - min_z;if (height_diff < height_diff_thresh) {return true;}return false;}} // namespace lidar} // namespace perception} // namespace apollo
插件使用
配置插件
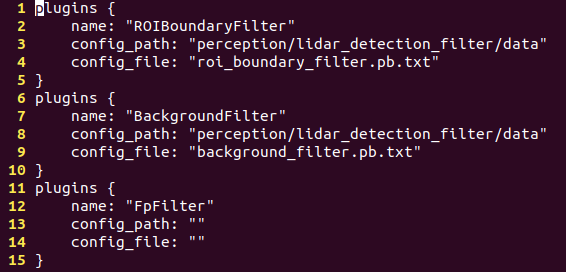
在/apollo/modules/perception/lidar_detection_filter/data/filter_bank.pb.txt中增加 fp_fitler 插件。如下图11行所示。
fp_filter插件的配置通过硬编码写到了程序中,所以 config_path 和 config_file 都为空。
结果示例
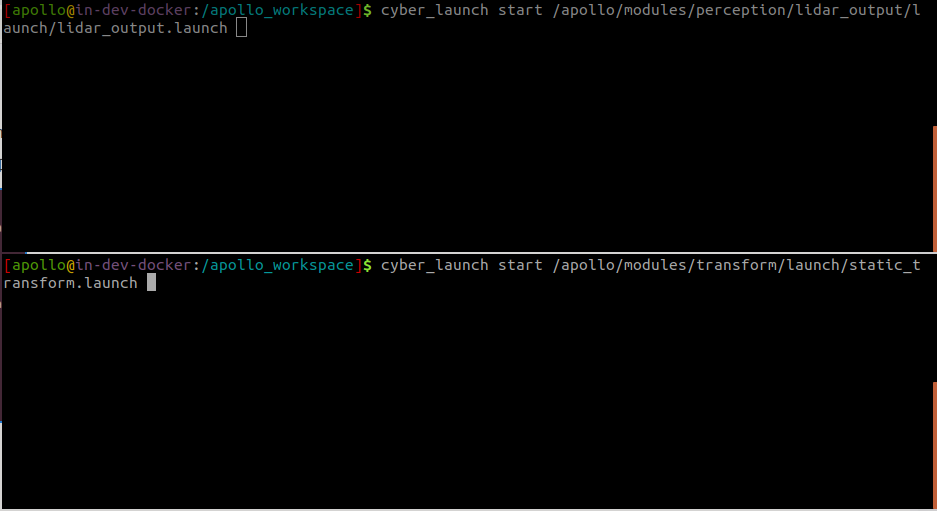
感知启动,通过cyber_launch启动lidar感知和transform模块。
然后通过cyber_record play -f ***.record来播包,只播放三个必要的通道,通过 -c 来控制。进入到目录 /home/apollo/.apollo/resources/records,执行:
cyber_recorder play -f demo3_mkz_110_sunnybigloop.record -c /tf /apollo/sensor/velodyne64/compensator/PointCloud2 /apollo/localization/pose
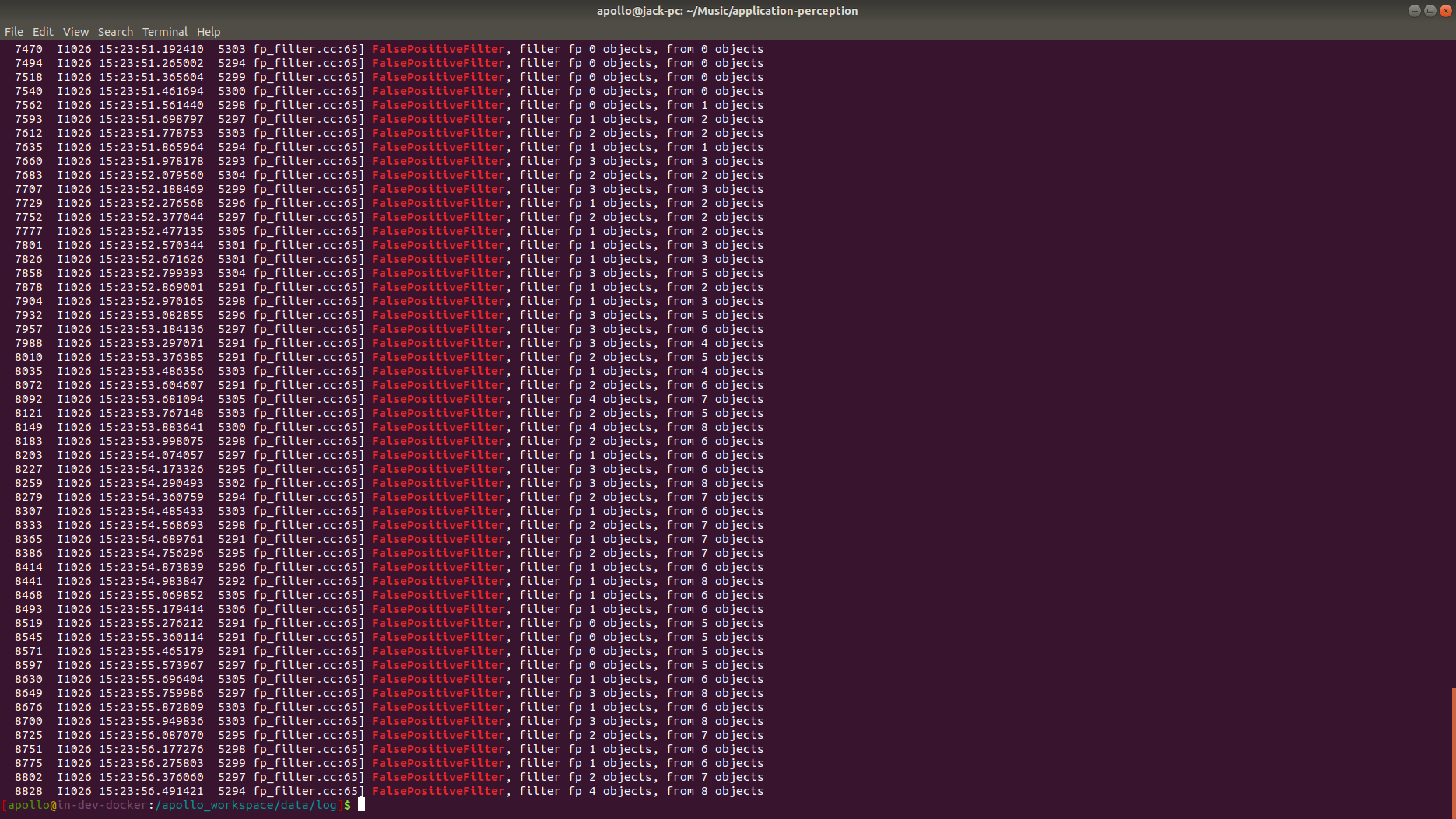
感知结果:
通过 mainboard.INFO 查看感知日志,能够看到fp_fitler在正常工作,能够根据规则过滤目标。