

apollo介绍之planning模块(四)
Planning模块简介
规划(planning)模块的作用是根据感知预测的结果,当前的车辆信息和路况规划出一条车辆能够行驶的轨迹,这个轨迹会交给控制(control)模块,控制模块通过油门,刹车和方向盘使得车辆按照规划的轨迹运行。
规划模块的轨迹是短期轨迹,即车辆短期内行驶的轨迹,长期的轨迹是routing模块规划出的导航轨迹,即起点到目的地的轨迹,规划模块会先生成导航轨迹,然后根据导航轨迹和路况的情况,沿着短期轨迹行驶,直到目的地。这点也很好理解,我们开车之前先打开导航,然后根据导航行驶,如果前面有车就会减速或者变道,超车,避让行人等,这就是短期轨迹,结合上述方式直到行驶到目的地。
Planning输入输出
我们先看下Apollo的数据流向:
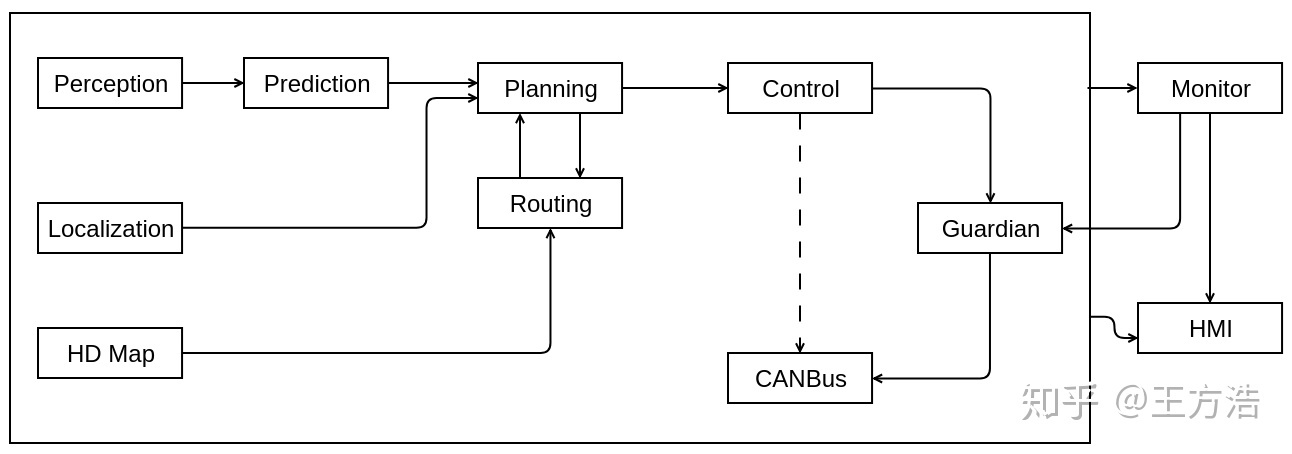
可以看到规划(planning)模块的上游是Localization, Prediction, Routing模块,而下游是Control模块。Routing模块先规划出一条导航线路,然后Planning模块根据这条线路做局部优化,如果Planning模块发现短期规划的线路行不通(比如前面修路,或者错过了路口),会触发Routing模块重新规划线路,因此这两个模块的数据流是双向的。
Planning模块的输入在"planning_component.h"中,接口如下:
bool Proc(const std::shared_ptr<prediction::PredictionObstacles>&prediction_obstacles,const std::shared_ptr<canbus::Chassis>& chassis,const std::shared_ptr<localization::LocalizationEstimate>&localization_estimate) override;
输入参数为:
- 预测的障碍物信息(prediction_obstacles)
- 车辆底盘(chassis)信息(车辆的速度,加速度,航向角等信息)
- 车辆当前位置(localization_estimate)
实际上还有高精度地图信息,不在参数中传入,而是在函数中直接读取的。
Planning模块的输出结果在"PlanningComponent::Proc()"中,为规划好的线路,发布到Control模块订阅的Topic中。
输出结果为:规划好的路径。
planning_writer_->Write(std::make_shared<ADCTrajectory>(adc_trajectory_pb));
Planning整个流程
下图是整个Planning模块的执行过程:
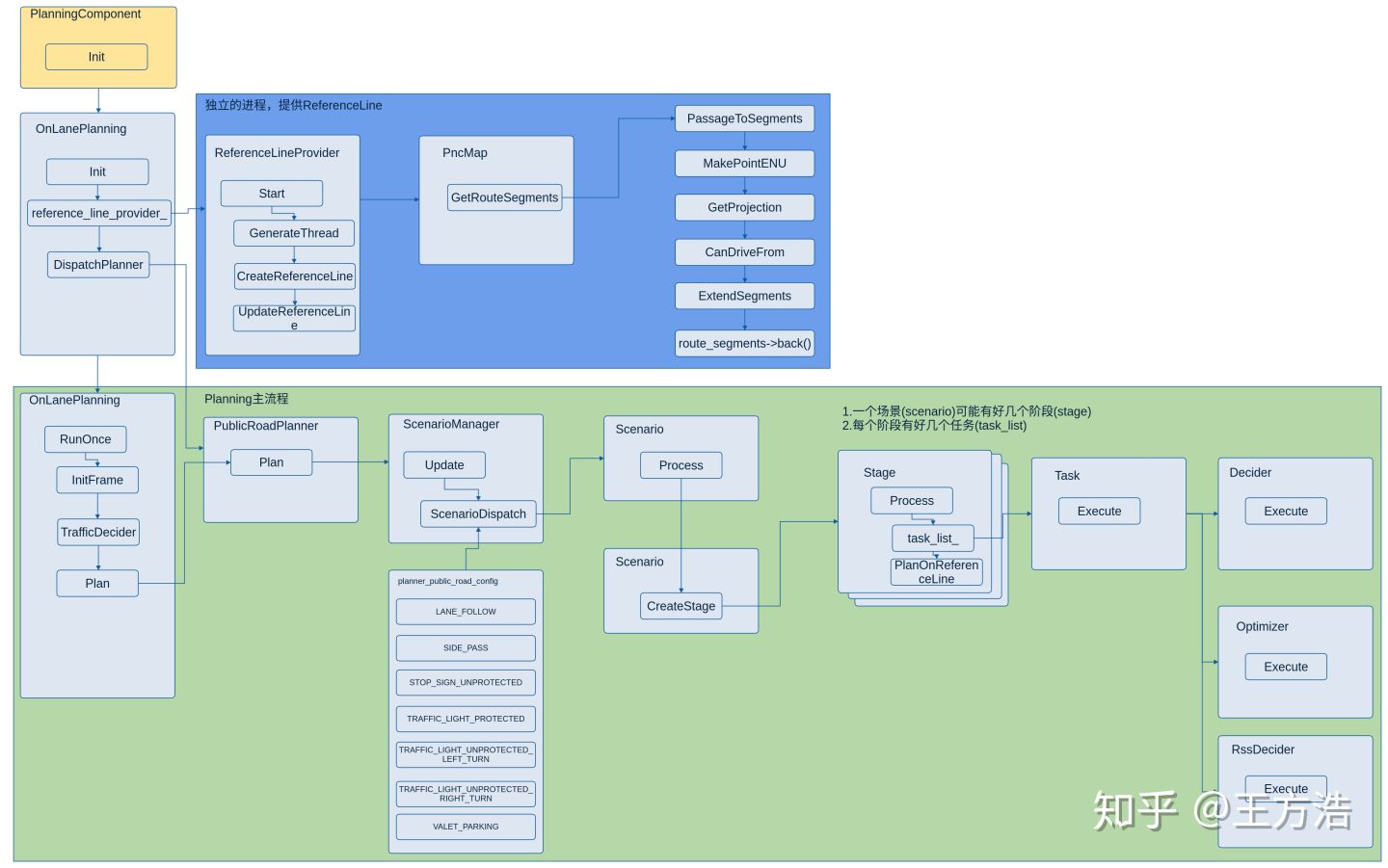
- 模块的入口是PlanningComponent,在Cyber中注册模块,订阅和发布消息,并且注册对应的Planning类。
- Planning的过程之前是定时器触发,即每隔一段固定的时间执行一次,现已经改为事件触发,即只要收集完成对应TOPIC的消息,就会触发执行,这样的好处是提高的实时性。
- Planning类主要实现了2个功能,一个是启动ReferenceLineProvider来提供参考线,后面生成的轨迹都是在参考线的基础上做优化,ReferenceLineProvider启动了一个单独的线程,每隔50ms执行一次,和Planning主流程并行执行。Planning类另外的一个功能是执行Planning主流程。
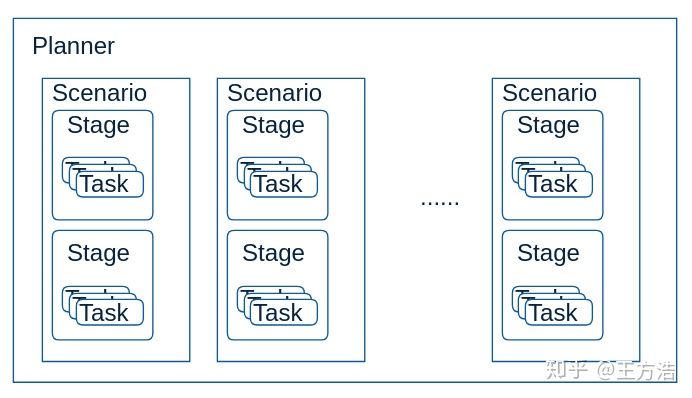
- Planning主流程先是选择对应的Planner,我们这里主要分析PublicRoadPlanner,在配置文件中定义了Planner支持的场景(Scenario),把规划分为具体的几个场景来执行,每个场景又分为几个阶段(Stage),每个阶段会执行多个任务(Task),任务执行完成后,对应的场景就完成了。不同场景间的切换是由一个状态机(ScenarioDispatch)来控制的。规划控制器根据ReferenceLineProvider提供的参考线,在不同的场景下做切换,生成一条车辆可以行驶的轨迹,并且不断重复上述过程直到到达目的地。
接下来我们逐步分析整个planning模块的代码结构。
Planning模块入口
模块注册
Planning模块的入口为"planning_component.h"和"http://planning_component.cc"两个文件,实现的功能如下:
// 订阅和发布消息std::shared_ptr<cyber::Reader<perception::TrafficLightDetection>>traffic_light_reader_;std::shared_ptr<cyber::Reader<routing::RoutingResponse>> routing_reader_;std::shared_ptr<cyber::Reader<planning::PadMessage>> pad_message_reader_;std::shared_ptr<cyber::Reader<relative_map::MapMsg>> relative_map_reader_;std::shared_ptr<cyber::Writer<ADCTrajectory>> planning_writer_;std::shared_ptr<cyber::Writer<routing::RoutingRequest>> rerouting_writer_;// 在Cyber中注册模块CYBER_REGISTER_COMPONENT(PlanningComponent)
模块初始化
除了注册模块,订阅和发布消息之外,planning模块实现了2个主要函数"init"和"proc"。
Init中实现了模块的初始化:
if (FLAGS_open_space_planner_switchable) {planning_base_ = std::make_unique<OpenSpacePlanning>();} else {if (FLAGS_use_navigation_mode) {planning_base_ = std::make_unique<NaviPlanning>();} else {planning_base_ = std::make_unique<OnLanePlanning>();}}
上面实现了3种Planning的注册,planning模块根据配置选择不同的Planning实现方式,"FLAGS_open_space_planner_switchable"和"FLAGS_use_navigation_mode"在Planning模块的conf目录中。因为上述2个配置默认都为false,Planning默认情况下的实现是"OnLanePlanning"。下面介绍下这3种Planning的区别。
- OpenSpacePlanning- 主要的应用场景是自主泊车和狭窄路段的掉头。[参考](ApolloAuto/apollo)
- NaviPlanning
- OnLanePlanning- 主要的应用场景是开放道路的自动驾驶。
模块之间的关系如下:
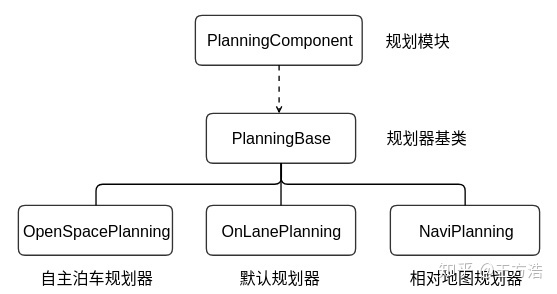
可以看到"OpenSpacePlanning","NaviPlanning"和"OnLanePlanning"都继承自同一个基类,并且在PlanningComponent中通过配置选择一个具体的实现进行注册。
Init接下来实现了具体的消息发布和消息订阅,我们只看具体的一个例子:
// 读取routing模块的消息routing_reader_ = node_->CreateReader<RoutingResponse>(FLAGS_routing_response_topic,[this](const std::shared_ptr<RoutingResponse>& routing) {AINFO << "Received routing data: run routing callback."<< routing->header().DebugString();std::lock_guard<std::mutex> lock(mutex_);routing_.CopyFrom(*routing);});// 读取红绿灯traffic_light_reader_ = ...// 是否使用导航模式if (FLAGS_use_navigation_mode) {pad_message_reader_ = ...// 读取相对地图relative_map_reader_ = ...}// 发布规划好的线路planning_writer_ =node_->CreateWriter<ADCTrajectory>(FLAGS_planning_trajectory_topic);// 发布重新规划请求rerouting_writer_ =node_->CreateWriter<RoutingRequest>(FLAGS_routing_request_topic);
至此,Planning模块的初始化就完成了。
模块运行
Proc的主要是检查数据,并且执行注册好的Planning,生成路线并且发布。
bool PlanningComponent::Proc(...) {// 1. 检查是否需要重新规划线路。CheckRerouting();// 2. 数据放入local_view_中,并且检查输入数据。...// 3. 执行注册好的Planning,生成线路。planning_base_->RunOnce(local_view_, &adc_trajectory_pb);// 4. 发布消息planning_writer_->Write(std::make_shared<ADCTrajectory>(adc_trajectory_pb));}
整个"PlanningComponent"的分析就完成了,可以看到"PlanningComponent"是Planning模块的入口,在Apollo3.5引入了Cyber之后,实现了Planning模块在Cyber中的注册,订阅和发布topic消息。同时实现了3种不同的Planning,根据配置选择其中的一种并且运行。
由于默认的Planning是开放道路的OnLanePlanning,我们接下来主要分析这个Planning。
OnLanePlanning
每次Planning会根据以下2个信息作为输入来执行:
- Planning上下文信息
- Frame结构体(车辆信息,位置信息等所有规划需要用到的信息,在/planning/common/frame.h中)
uint32_t sequence_num_ = 0;LocalView local_view_;const hdmap::HDMap *hdmap_ = nullptr;common::TrajectoryPoint planning_start_point_;common::VehicleState vehicle_state_;std::list<ReferenceLineInfo> reference_line_info_;bool is_near_destination_ = false;/*** the reference line info that the vehicle finally choose to drive on**/const ReferenceLineInfo *drive_reference_line_info_ = nullptr;ThreadSafeIndexedObstacles obstacles_;std::unordered_map<std::string, const perception::TrafficLight *>traffic_lights_;ChangeLaneDecider change_lane_decider_;ADCTrajectory current_frame_planned_trajectory_; // last published trajectorystd::vector<routing::LaneWaypoint> future_route_waypoints_;
初始化
OnLanePlanning的初始化逻辑在Init中,主要实现分配具体的Planner,启动参考线提供器(reference_line_provider_),代码分析如下:
Status OnLanePlanning::Init(const PlanningConfig& config) {...// 启动参考线提供器,会另启动一个线程,执行一个定时任务,每隔50ms提供一次参考线。reference_line_provider_ = std::make_unique<ReferenceLineProvider>(hdmap_);reference_line_provider_->Start();// 为Planning分配具体的Planner。planner_ = planner_dispatcher_->DispatchPlanner();...}
可以看到"DispatchPlanner"在"OnLanePlanning"实例化的时候就指定了。
class OnLanePlanning : public PlanningBase {public:OnLanePlanning() {planner_dispatcher_ = std::make_unique<OnLanePlannerDispatcher>();}
在看"OnLanePlannerDispatcher"具体的实现,也是根据配置选择具体的"Planner",默认为"PUBLIC_ROAD"规划器:
// 配置文件standard_planning_config {planner_type: PUBLIC_ROADplanner_type: OPEN_SPACE...}// OnLanePlannerDispatcher具体实现std::unique_ptr<Planner> OnLanePlannerDispatcher::DispatchPlanner() {PlanningConfig planning_config;apollo::cyber::common::GetProtoFromFile(FLAGS_planning_config_file,&planning_config);if (FLAGS_open_space_planner_switchable) {return planner_factory_.CreateObject(// OPEN_SPACE规划器planning_config.standard_planning_config().planner_type(1));}return planner_factory_.CreateObject(// PUBLIC_ROAD规划器planning_config.standard_planning_config().planner_type(0));}
事件触发
OnLanePlanning的主要逻辑在"RunOnce()"中,在Apollo 3.5之前是定时器触发,3.5改为事件触发,即收到对应的消息之后,就触发执行,这样做的好处是增加了实时性参考。
void OnLanePlanning::RunOnce(const LocalView& local_view,ADCTrajectory* const ptr_trajectory_pb) {// 初始化Framestatus = InitFrame(frame_num, stitching_trajectory.back(), vehicle_state);...// 判断是否符合交通规则for (auto& ref_line_info : *frame_->mutable_reference_line_info()) {TrafficDecider traffic_decider;traffic_decider.Init(traffic_rule_configs_);auto traffic_status = traffic_decider.Execute(frame_.get(), &ref_line_info);if (!traffic_status.ok() || !ref_line_info.IsDrivable()) {ref_line_info.SetDrivable(false);AWARN << "Reference line " << ref_line_info.Lanes().Id()<< " traffic decider failed";continue;}}// 执行计划status = Plan(start_timestamp, stitching_trajectory, ptr_trajectory_pb);...}Status OnLanePlanning::Plan(const double current_time_stamp,const std::vector<TrajectoryPoint>& stitching_trajectory,ADCTrajectory* const ptr_trajectory_pb) {...// 调用具体的(PUBLIC_ROAD)Planner执行auto status = planner_->Plan(stitching_trajectory.back(), frame_.get(),ptr_trajectory_pb);...}
上述就是"OnLanePlanning"的执行过程,先是Planner分发器根据配置,选择具体的planner,然后初始化Frame,(PUBLIC_ROAD)planner根据输入帧执行"Plan"方法。
Planner
我们先看下Planner目录结构,一共实现了5种Planner:
.├── BUILD├── navi_planner_dispatcher.cc├── navi_planner_dispatcher.h├── navi_planner_dispatcher_test.cc├── on_lane_planner_dispatcher.cc├── on_lane_planner_dispatcher.h├── on_lane_planner_dispatcher_test.cc├── planner_dispatcher.cc├── planner_dispatcher.h├── planner.h├── lattice // lattice planner├── navi // navi planner├── open_space // open space planner├── public_road // public road planner└── rtk // rtk planner
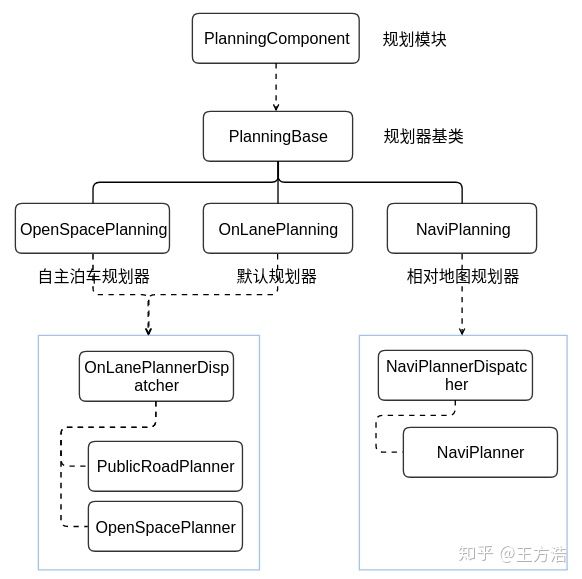
可以看到Planner目录分别实现了Planner发布器和具体的Planner,关于发布器我们后面会根据流程图来介绍,这里先介绍一下5种不同的Planner。
- rtk- 根据录制的轨迹来规划行车路线
- public_road- 开放道路的轨迹规划器
- lattice- 基于网格算法的轨迹规划器
- navi- 基于实时相对地图的规划器
- open_space- 自主泊车规划器
Planner注册场景
下面我们整理一下planner模块的流程:
- PlanningComponent在cyber中注册
- 选择Planning
- 根据不同的Dispatcher,分发Planner
下面我们主要介绍"PublicRoadPlanner",主要的实现还是在Init和Plan中。
init中主要是注册规划器支持的场景(scenario)。
Status PublicRoadPlanner::Init(const PlanningConfig& config) {// 读取public Road配置const auto& public_road_config =config_.standard_planning_config().planner_public_road_config();// 根据配置注册不同的场景for (int i = 0; i < public_road_config.scenario_type_size(); ++i) {const ScenarioConfig::ScenarioType scenario =public_road_config.scenario_type(i);supported_scenarios.insert(scenario);}scenario_manager_.Init(supported_scenarios);}
我们看下"PublicRoadPlanner"支持的场景有哪些?
// 还是在"/conf/planning_config.pb.txt"中standard_planning_config {planner_type: PUBLIC_ROADplanner_type: OPEN_SPACEplanner_public_road_config {// 支持的场景scenario_type: LANE_FOLLOW // 车道线保持scenario_type: SIDE_PASS // 超车scenario_type: STOP_SIGN_UNPROTECTED // 停止scenario_type: TRAFFIC_LIGHT_PROTECTED // 红绿灯scenario_type: TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN // 红绿灯左转scenario_type: TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN // 红绿灯右转scenario_type: VALET_PARKING // 代客泊车}
运行场景
接着看"Plan"中的实现:
Status PublicRoadPlanner::Plan(const TrajectoryPoint& planning_start_point,Frame* frame,ADCTrajectory* ptr_computed_trajectory) {DCHECK_NOTNULL(frame);// 更新场景,决策当前应该执行什么场景scenario_manager_.Update(planning_start_point, *frame);// 获取当前场景scenario_ = scenario_manager_.mutable_scenario();// 执行当前场景的任务auto result = scenario_->Process(planning_start_point, frame);// 当前场景完成if (result == scenario::Scenario::STATUS_DONE) {// only updates scenario manager when previous scenario's status is// STATUS_DONEscenario_manager_.Update(planning_start_point, *frame);} else if (result == scenario::Scenario::STATUS_UNKNOWN) {// 当前场景失败return Status(common::PLANNING_ERROR, "scenario returned unknown");}return Status::OK();}
可以看到"Planner"模块把具体的规划转化成一系列的场景,每次执行规划之前先判断更新当前的场景,然后针对具体的场景去执行。
下面我们先看下"Scenario"模块,然后把这2个模块串起来讲解。
Scenario
我们同样先看下"Scenario"的目录结构:
.├── bare_intersection├── BUILD├── lane_follow // 车道线保持├── narrow_street_u_turn // 狭窄掉头├── scenario.cc├── scenario.h├── scenario_manager.cc├── scenario_manager.h├── side_pass // 超车├── stage.cc├── stage.h├── stop_sign // 停止├── traffic_light // 红绿灯├── util└── valet_parking // 代客泊车
其中需要知道场景如何转换,以及每种场景如何执行。几种场景的介绍可以先看下Apollo的官方文档[planning](ApolloAuto/apollo),主要的场景是lane_follow,side_pass和stop_sign。
场景转换
场景转换的实现在"http://scenario_manager.cc"中,其中实现了场景注册,创建场景和更新场景的功能。
bool ScenarioManager::Init(const std::set<ScenarioConfig::ScenarioType>& supported_scenarios) {// 注册场景RegisterScenarios();default_scenario_type_ = ScenarioConfig::LANE_FOLLOW;supported_scenarios_ = supported_scenarios;// 创建场景,默认为lane_followcurrent_scenario_ = CreateScenario(default_scenario_type_);return true;}// 更新场景void ScenarioManager::Update(const common::TrajectoryPoint& ego_point,const Frame& frame) {CHECK(!frame.reference_line_info().empty());// 保留当前帧Observe(frame);// 场景分发ScenarioDispatch(ego_point, frame);}// 通过一个有限状态机,决定当前的场景void ScenarioManager::ScenarioDispatch(const common::TrajectoryPoint& ego_point,const Frame& frame) {...}
其中"ScenarioDispatch"的状态切换可以参考下图:
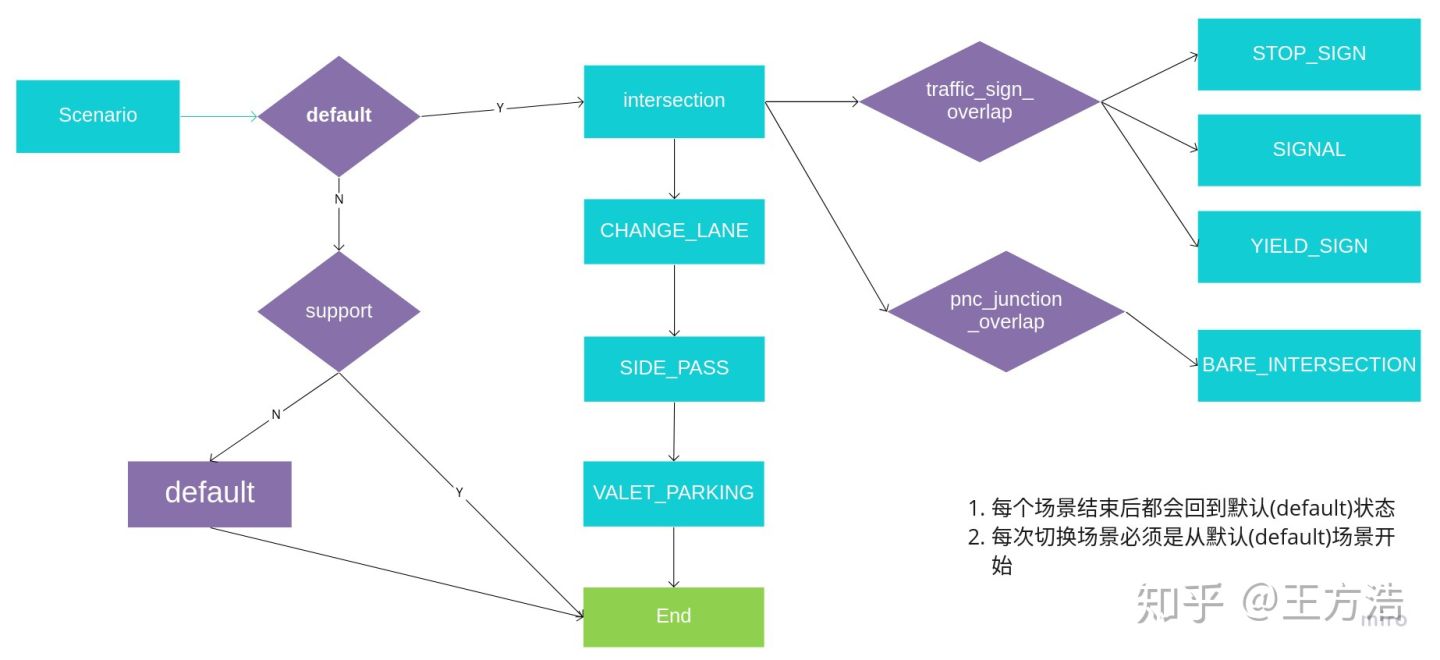
可以看到,每次切换场景必须是从默认场景(LANE_FOLLOW)开始,即每次场景切换之后都会回到默认场景。
ScenarioDispatch目前的代码还没完全完成(有些分支TODO),而且个人感觉这个实现不够简介和优秀,逻辑看起来有些混乱,不知道是否可以用状态机改进?
场景运行
场景的执行在"scenario.cc"和对应的场景目录中,实际上每个场景又分为一个或者多个阶段(stage),每个阶段又由不同的任务(task)组成。执行一个场景,就是顺序执行不同阶段的不同任务。
下面我们来看一个具体的例子,Scenario对应的stage和task在"planning/conf/scenario"中。
// Scenario对应的Stagescenario_type: SIDE_PASSstage_type: SIDE_PASS_APPROACH_OBSTACLEstage_type: SIDE_PASS_GENERATE_PATHstage_type: SIDE_PASS_STOP_ON_WAITPOINTstage_type: SIDE_PASS_DETECT_SAFETYstage_type: SIDE_PASS_PASS_OBSTACLEstage_type: SIDE_PASS_BACKUP// Stage对应的Taskstage_type: SIDE_PASS_APPROACH_OBSTACLEenabled: truetask_type: DP_POLY_PATH_OPTIMIZERtask_type: PATH_DECIDERtask_type: SPEED_BOUNDS_PRIORI_DECIDERtask_type: DP_ST_SPEED_OPTIMIZERtask_type: SPEED_DECIDERtask_type: SPEED_BOUNDS_FINAL_DECIDERtask_type: QP_SPLINE_ST_SPEED_OPTIMIZER// 以此类推
由于Scenario都是顺序执行,只需要判断这一阶段是否结束,然后转到下一个阶段就可以了。具体的实现在:
Scenario::ScenarioStatus Scenario::Process(const common::TrajectoryPoint& planning_init_point, Frame* frame) {...// 如果当前阶段完成,则退出if (current_stage_->stage_type() == ScenarioConfig::NO_STAGE) {scenario_status_ = STATUS_DONE;return scenario_status_;}// 进入下一阶段执行或者错误处理auto ret = current_stage_->Process(planning_init_point, frame);switch (ret) {case Stage::ERROR: {...}case Stage::RUNNING: {...}case Stage::FINISHED: {...}default: {...}}return scenario_status_;}
我们接着看一下Stage中"Process"的执行:
Stage::StageStatus LaneFollowStage::Process(const TrajectoryPoint& planning_start_point, Frame* frame) {...// 根据参考线规划auto cur_status =PlanOnReferenceLine(planning_start_point, frame, &reference_line_info);...}// LANE_FOLLOW中的PlanOnReferenceLineStatus LaneFollowStage::PlanOnReferenceLine(const TrajectoryPoint& planning_start_point, Frame* frame,ReferenceLineInfo* reference_line_info) {// 顺序执行stage中的任务for (auto* optimizer : task_list_) {const double start_timestamp = Clock::NowInSeconds();// 任务ret = optimizer->Execute(frame, reference_line_info);}// 增加障碍物的代价for (const auto* obstacle :reference_line_info->path_decision()->obstacles().Items()) {if (obstacle->IsVirtual()) {continue;}if (!obstacle->IsStatic()) {continue;}if (obstacle->LongitudinalDecision().has_stop()) {...}}// 返回参考线reference_line_info->SetTrajectory(trajectory);reference_line_info->SetDrivable(true);return Status::OK();}
上面是用"LaneFollowStage"中的"PlanOnReferenceLine"来举例子,不同场景中的"PlanOnReferenceLine"实现可能也不一样,这样设计的好处是,当发现一个场景有问题,需要修改不会影响到其他的场景。同时也可以针对不同场景做优化,比通用的规划更加适合单独的场景。每种场景都有一个专门的目录来进行优化。
接下来我们看下Task是如何执行的。
Task
我们先看Task的目录结构:
.├── BUILD├── deciders // 决策器├── optimizers // 优化器├── rss├── smoothers // 平滑器├── task.cc├── task_factory.cc├── task_factory.h└── task.h
可以看到每个Task都可以对应到一个决策器或者优化器(平滑器不作为Task,单独作为一个类)。
每个Task都实现了"Execute"方法,而每个决策器和优化器都继承至Task类。可以参考下图:
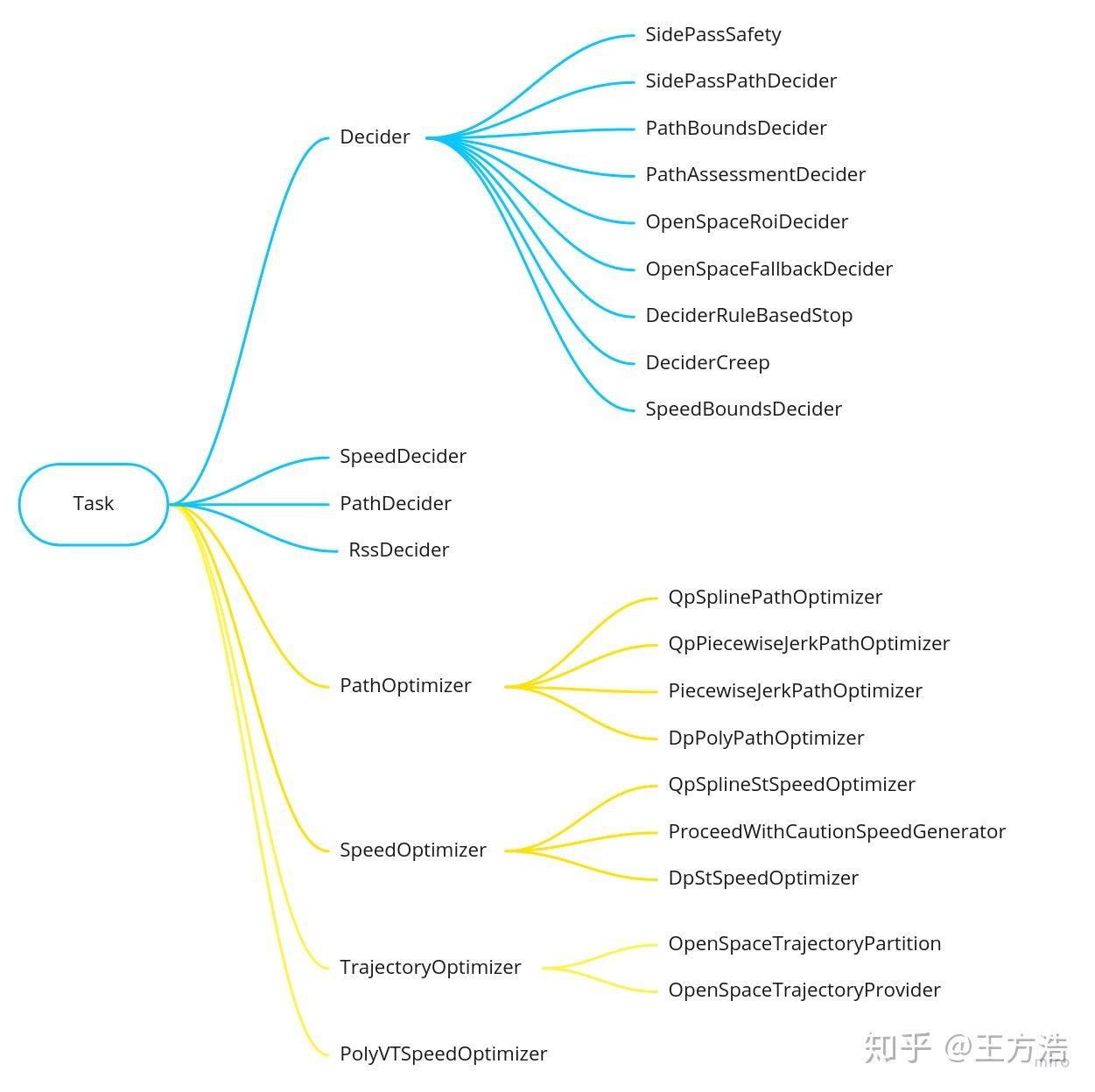
Task类的生成用到了设计模式的工厂模式,通过"TaskFactory"类生产不同的Task类。
DP & QP
Task中的决策器和优化器采用的方法有DP和QP:
- DP- 动态规划
- QP- 二次规划
QP方法的路径优化和速度优化可以参考apollo文档:
[QP-Spline-Path Optimizer](ApolloAuto/apollo)
[QP-Spline-ST-Speed Optimizer](ApolloAuto/apollo)
