

apollo介绍之localization模块(三)
Localization模块简介
localization模块主要实现了以下2个功能:
1.输出车辆的位置信息(planning模块使用)2.输出车辆的姿态,速度信息(control模块使用)
其中apollo代码中分别实现了3种定位方法:
1. GNSS + IMU定位2. NDT定位(点云定位)3. MSF(上面2种方式的融合定位)
MSF方法并没有开发源码,是以动态库的方式提供的。实现的思路可以参考论文"Robust and Precise Vehicle Localization Based on Multi-Sensor Fusion in Diverse City Scenes"
目录
下面是localization的目录结构,看之前最好看下该模块的readme文件
├── common // 声明配置(flags),从conf目录中读取相应的值├── conf // 配置文件存放目录├── dag // cyber DAG流├── launch // cyber的配置文件,依赖DAG图(这2个和cyber有关的后面再分析)├── msf // 融合定位(gnss,点云,IMU融合定位)│ ├── common│ │ ├── io│ │ ├── test_data│ │ └── util│ ├── local_integ│ ├── local_map│ │ ├── base_map│ │ ├── lossless_map│ │ ├── lossy_map│ │ ├── ndt_map│ │ └── test_data│ ├── local_tool│ │ ├── data_extraction│ │ ├── local_visualization│ │ └── map_creation│ └── params│ ├── gnss_params│ ├── vehicle_params│ └── velodyne_params├── ndt // ndt定位│ ├── map_creation│ ├── ndt_locator│ └── test_data│ ├── ndt_map│ └── pcds├── proto // 消息格式├── rtk // rtk定位└── testdata // imu和gps的测试数据
可以看到,主要是rtk,ndt,msf这3个目录分别代表了不同的定位方法,而proto是消息的格式定义,common和conf主要是存放一些配置和消息TOPIC。下面我们逐个分析各个模块。
RTK
可以看到rtk模块相对比较简单,目录结构如下:
├── BUILD // bazel编译文件├── rtk_localization.cc // rtk定位功能实现模块├── rtk_localization_component.cc // rtk消息发布模块├── rtk_localization_component.h├── rtk_localization.h└── rtk_localization_test.cc // 测试
在http://rtk_localization_component.cc中可以看到
RTKLocalizationComponent::RTKLocalizationComponent(): localization_(new RTKLocalization()) {}
即class RTKLocalization()实际上是RTKLocalizationComponent()中的一个属性localization_,我们可以发现apollo模块的架构大部分都是这样,一个模块负责发布接收消息,一个模块负责实现具体的功能,后面的模块在前面的模块中注册为一个属性。
具体的类图如下:
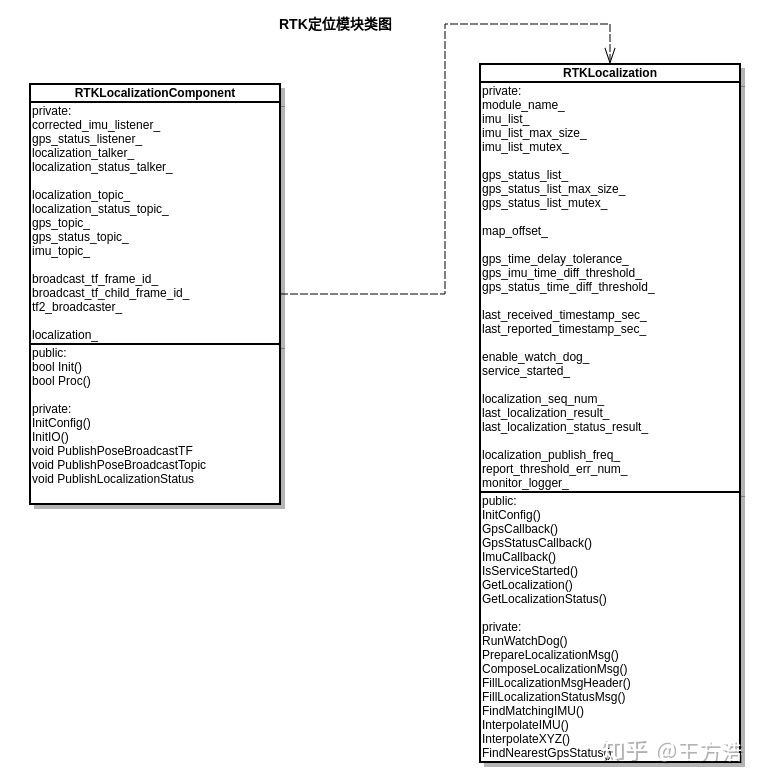
RTK模块类图
其中RTKLocalization首先读取驱动模块发布的gnss消息,然后再调用GpsCallback输出位置。
1.通过回调读取gnss驱动发布的消息
在gnss driver中DataParser类通过PublishCorrimu发布IMU的消息,而RTKLocalizationComponent::InitIO中绑定了回调
corrected_imu_listener_ = node_->CreateReader<localization::CorrectedImu>(imu_topic_, std::bind(&RTKLocalization::ImuCallback, localization_.get(),std::placeholders::_1));
当读取imu_topic_的消息时候,调用ImuCallback回调,把数据放到imu_list_中。
2. 通过GpsCallback返回位置信息,下面是GpsCallback的函数调用顺序
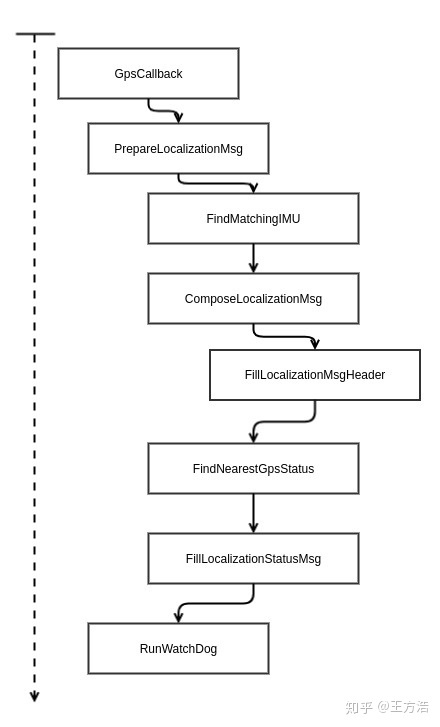
上面就是RTK模块的工作流程。
