

理解Planing 2.0插件机制-新增Scenario插件
Planing运行机制回顾
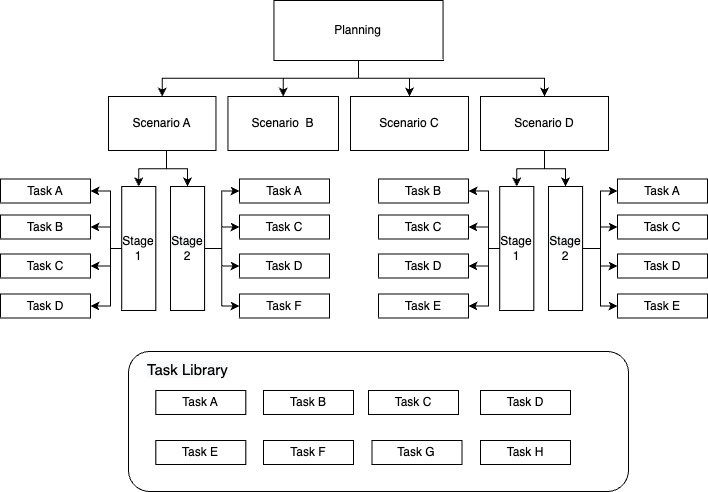
Apollo采用的是双状态机的框架,场景(Scenario)是规划模块的状态机,由场景管理器来切换调度,阶段(Stage)是场景的状态机,由场景来切换调度,任务(Task)是具体执行的规划运算,由阶段来编排调度。任务可以从任务库中复用我们现有的任务,也可以开发新的任务加入到任务库中,供各个场景阶段复用。
场景开发实践——新增一个左转待转场景
场景需求
这里以apollo_virtual_map为地图,开发一个左转待转场景。左转待转场景可以分为两个区域,直行区和左转待转区。
主车在直行区:
如果左转红灯、直行绿灯,则车辆可以进入左转待转区

如果左转绿灯,无论直行灯是红灯还是绿灯都可以通过路口
如果左转红灯、直行红灯,则车辆在直行区停止线等待
主车在左转区:
如果左转为红灯,直行为绿灯,则车辆在左转区停止线前等待

如果左转为绿灯,则车辆可以通行路口

p.s.在待转区如果左转灯由绿变成红,则主车可以不需要在待转区等待,通行路口
额外要求:每个区域巡航速度不同,在直行区巡航速度为5m/s,左转区巡航速度3m/s,通过路口巡航速度8m/s
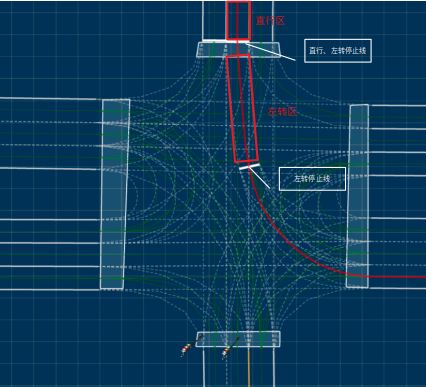
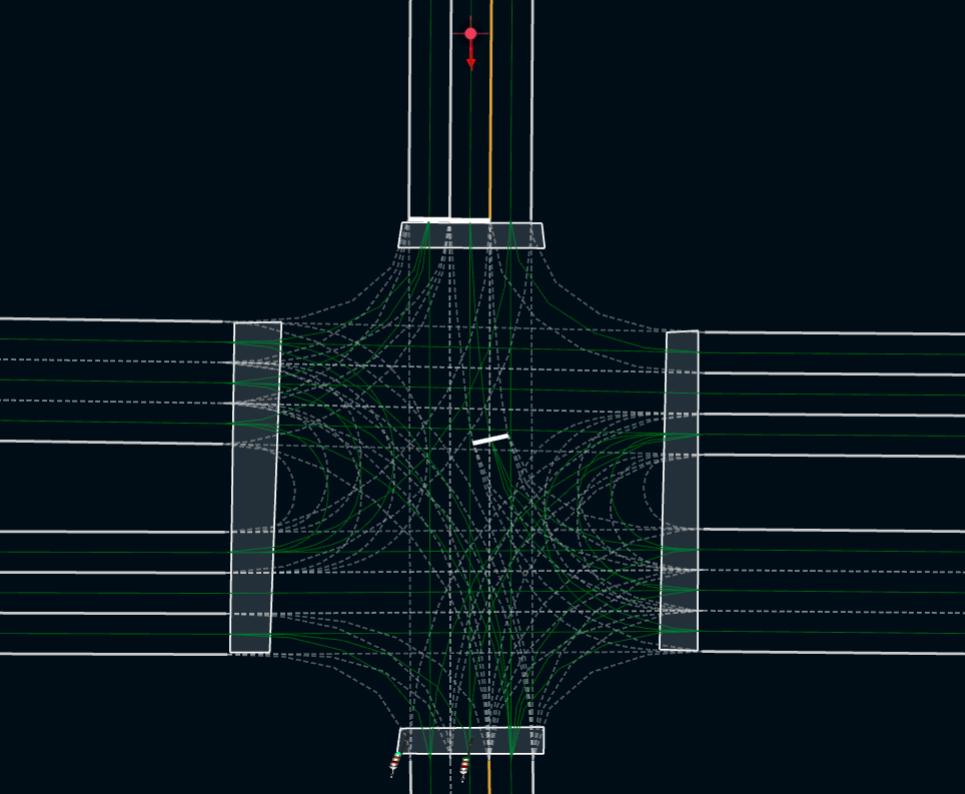
在base_map.txt的地图文件可以观察下左转待转区的元素:
左转待转场景,左转灯在左转车道上存在两条停止线,分别在直行区和左转区,左转灯的subsignal的类型为ARROW_LEFT;而直行灯在左转的车道上只有一条停止线,位于直行区,且直行灯的subsignal为CIRCLE类型。可以依此来判断是否进入左转待转场景
阶段的划分:
我们可以根据行驶过程分为:
- 在直行区停车等待的阶段TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_APPROACH
- 在待转区行停车等待的阶段TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CREEP
- 通过路口的阶段TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE
实践步骤
- 在包管理环境下创建插件模板,通过以下命令可以创建一个左转待转插件的模板
- 在包管理模版基础上实现左转待转的Scneario子类
- 在IsTransferable()函数中添加场景切入条件:当发现当前参考线上有两个id一样的信号灯overlap,而且是左转信号灯,且其中一个overlap在最近的信号灯组内,则切入该场景
- 在Enter()函数设置进入场景前的参数初始化,将直行信号灯,左转信号灯id保存到context_变量中
- 在Exit()函数设置场景切出时对成员变量和全局变量的重置
文件目录:
planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.cc
#include <memory>#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.h"namespace apollo {namespace planning {using apollo::hdmap::HDMapUtil;bool TrafficLightLeftTurnWaitingZone::Init(std::shared_ptr<DependencyInjector> injector, const std::string& name) {if (!Scenario::Init(injector, name)) {AERROR << "failed to init scenario" << Name();return false;}if (!Scenario::LoadConfig<TrafficLightLeftTurnWaitingZoneConfig>(&context_.scenario_config)) {AERROR << "fail to get specific config of scenario " << Name();return false;}return true;}bool TrafficLightLeftTurnWaitingZone::IsTransferable(const Scenario* const other_scenario, const Frame& frame) {if (other_scenario == nullptr || frame.reference_line_info().empty()) {return false;}const auto& reference_line_info = frame.reference_line_info().front();const auto& first_encountered_overlaps = reference_line_info.FirstEncounteredOverlaps();const std::vector<hdmap::PathOverlap> traffic_light_overlaps= reference_line_info.reference_line().map_path().signal_overlaps();if (first_encountered_overlaps.empty()) {return false;}hdmap::PathOverlap* traffic_sign_overlap = nullptr;for (const auto& overlap : first_encountered_overlaps) {if (overlap.first == ReferenceLineInfo::STOP_SIGN || overlap.first == ReferenceLineInfo::YIELD_SIGN) {return false;} else if (overlap.first == ReferenceLineInfo::SIGNAL) {traffic_sign_overlap = const_cast<hdmap::PathOverlap*>(&overlap.second);break;}}if (traffic_sign_overlap == nullptr) {return false;}const double start_check_distance = context_.scenario_config.start_traffic_light_scenario_distance();const double adc_front_edge_s = reference_line_info.AdcSlBoundary().end_s();if (traffic_sign_overlap->start_s - adc_front_edge_s > start_check_distance) {return false;}const auto& turn_type = reference_line_info.GetPathTurnType(traffic_sign_overlap->start_s);if (turn_type != hdmap::Lane::LEFT_TURN) {return false;}auto* base_map = HDMapUtil::BaseMapPtr();static constexpr double kTrafficLightGroupingMaxDist = 2.0; // unit: mfor (const auto& overlap : traffic_light_overlaps) {const double dist = overlap.start_s - traffic_sign_overlap->start_s;if (fabs(dist) <= kTrafficLightGroupingMaxDist) {const auto& signal = base_map->GetSignalById(hdmap::MakeMapId(overlap.object_id))->signal();if (signal.subsignal_size() > 0 && signal.subsignal(0).type() == apollo::hdmap::Subsignal::ARROW_LEFT&& signal.stop_line_size() > 1) {return true;}}}return false;}bool TrafficLightLeftTurnWaitingZone::Enter(Frame* frame) {const auto& reference_line_info = frame->reference_line_info().front();const auto& first_encountered_overlaps = reference_line_info.FirstEncounteredOverlaps();const std::vector<hdmap::PathOverlap> traffic_light_overlaps= reference_line_info.reference_line().map_path().signal_overlaps();hdmap::PathOverlap* nearest_traffic_light_overlap = nullptr;for (const auto& overlap : first_encountered_overlaps) {if (overlap.first == ReferenceLineInfo::SIGNAL) {nearest_traffic_light_overlap = const_cast<hdmap::PathOverlap*>(&overlap.second);break;}}std::vector<hdmap::PathOverlap> next_traffic_lights;auto* base_map = HDMapUtil::BaseMapPtr();std::string left_turn_signal_id;static constexpr double kTrafficLightGroupingMaxDist = 2.0; // unit: mfor (const auto& overlap : traffic_light_overlaps) {const double dist = overlap.start_s - nearest_traffic_light_overlap->start_s;if (fabs(dist) <= kTrafficLightGroupingMaxDist) {const auto signal = base_map->GetSignalById(hdmap::MakeMapId(overlap.object_id));AINFO << signal->id().id() << "," << overlap.object_id;if (signal->signal().subsignal(0).type() == apollo::hdmap::Subsignal::ARROW_LEFT) {context_.left_turn_traffic_light_id = overlap.object_id;AINFO << "left_turn_signal_id" << context_.left_turn_traffic_light_id;} else {context_.forward_traffic_light_id = overlap.object_id;AINFO << "forward signal id" << context_.forward_traffic_light_id;}}}return true;}bool TrafficLightLeftTurnWaitingZone::Exit(Frame* frame) {context_.left_turn_traffic_light_id.clear();context_.forward_traffic_light_id.clear();auto done_traffic_light = injector_->planning_context()->mutable_planning_status()->mutable_traffic_light();done_traffic_light->mutable_done_traffic_light_overlap_id()->Clear();return true;}} // namespace planning} // namespace apollo
添加头文件modules/planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.h:
#pragma once#include <memory>#include "cyber/plugin_manager/plugin_manager.h"#include "modules/planning/planning_base/scenario_base/scenario.h"#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/proto/traffic_light_left_turn_waiting_zone.pb.h"namespace apollo {namespace planning {struct TrafficLightLeftTurnWaitingZoneContext : public ScenarioContext {TrafficLightLeftTurnWaitingZoneConfig scenario_config;std::string left_turn_traffic_light_id;std::string forward_traffic_light_id;};class TrafficLightLeftTurnWaitingZone : public apollo::planning::Scenario {public:bool Init(std::shared_ptr<DependencyInjector> injector, const std::string& name);TrafficLightLeftTurnWaitingZoneContext* GetContext() override {return &context_;}bool IsTransferable(const Scenario* other_scenario, const Frame& frame);bool Exit(Frame* frame);bool Enter(Frame* frame);private:TrafficLightLeftTurnWaitingZoneContext context_;};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::TrafficLightLeftTurnWaitingZone, apollo::planning::Scenario)} // namespace planning} // namespace apollo
- 开发左转待转的第一个阶段,行驶到直行区停止线的阶段TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_APPROACH,实现Stage的Process()函数:
- 在reference_line_info中设置该阶段的限速
- 如果左转灯是绿灯,且通过了停止线则切到TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE阶段,同时将直行灯加入到add_done_traffic_light_overlap_id的全局变量中
- 如果左转灯是红灯,直行灯是绿灯,则切到TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CREEP阶段,同时将左转灯加入到add_done_traffic_light_overlap_id的全局变量中
- 如果已经通过了停止线,则切入TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE阶段
文件路径:
planning/scenarios/traffic_light_left_turn_waiting_zone/stage_approach.cc
#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_approach.h"#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.h"#include "modules/common_msgs/perception_msgs/traffic_light_detection.pb.h"#include "cyber/common/log.h"#include "modules/planning/planning_base/common/frame.h"#include "modules/planning/planning_base/common/planning_context.h"namespace apollo {namespace planning {using apollo::common::TrajectoryPoint;using apollo::hdmap::PathOverlap;using apollo::perception::TrafficLight;StageResult TrafficLightLeftTurnWaitingZoneStageApproach::Process(const TrajectoryPoint& planning_init_point,Frame* frame) {ADEBUG << "stage: Approach";CHECK_NOTNULL(frame);CHECK_NOTNULL(context_);auto* context = GetContextAs<TrafficLightLeftTurnWaitingZoneContext>();const auto& scenario_config = context->scenario_config;auto& reference_line_info = frame->mutable_reference_line_info()->front();reference_line_info.LimitCruiseSpeed(scenario_config.approach_speed());StageResult result = ExecuteTaskOnReferenceLine(planning_init_point, frame);if (result.HasError()) {AERROR << "TrafficLightLeftTurnWaitingZoneStageApproach planning error";}if (context->left_turn_traffic_light_id.empty() || context->forward_traffic_light_id.empty()) {return FinishScenario();}hdmap::PathOverlap forward_traffic_light_overlap;hdmap::PathOverlap left_turn_traffic_light_overlap_first;hdmap::PathOverlap left_turn_traffic_light_overlap_second;const std::vector<hdmap::PathOverlap> traffic_light_overlaps= reference_line_info.reference_line().map_path().signal_overlaps();for (const auto& overlap : traffic_light_overlaps) {if (overlap.object_id == context->forward_traffic_light_id) {forward_traffic_light_overlap = overlap;} else if (overlap.object_id == context->left_turn_traffic_light_id) {if (left_turn_traffic_light_overlap_second.start_s < overlap.start_s) {std ::swap(left_turn_traffic_light_overlap_first, left_turn_traffic_light_overlap_second);left_turn_traffic_light_overlap_second = overlap;} else {left_turn_traffic_light_overlap_first = overlap;}}}const double adc_back_edge_s = reference_line_info.AdcSlBoundary().end_s();bool is_passed_forward_stop_line = adc_back_edge_s > forward_traffic_light_overlap.end_s;auto forward_signal_color = frame->GetSignal(context->forward_traffic_light_id).color();auto left_signal_color = frame->GetSignal(context->left_turn_traffic_light_id).color();auto done_traffic_light = injector_->planning_context()->mutable_planning_status()->mutable_traffic_light();done_traffic_light->mutable_done_traffic_light_overlap_id()->Clear();if (left_signal_color == TrafficLight::GREEN) {if (is_passed_forward_stop_line) {return FinishStage("TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE");}done_traffic_light->add_done_traffic_light_overlap_id(forward_traffic_light_overlap.object_id);} else if (forward_signal_color == TrafficLight::GREEN) {done_traffic_light->add_done_traffic_light_overlap_id(left_turn_traffic_light_overlap_first.object_id);}if (is_passed_forward_stop_line) {return FinishStage("TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CREEP");}return result.SetStageStatus(StageStatusType::RUNNING);}StageResult TrafficLightLeftTurnWaitingZoneStageApproach::FinishStage(std::string next_stage) {injector_->planning_context()->mutable_planning_status()->mutable_traffic_light()->mutable_done_traffic_light_overlap_id()->Clear();next_stage_ = next_stage;return StageResult(StageStatusType::FINISHED);}} // namespace planning} // namespace apollo
添加头文件modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_approach.h:
#pragma once#include "cyber/plugin_manager/plugin_manager.h"#include "modules/planning/planning_base/scenario_base/stage.h"namespace apollo {namespace planning {class TrafficLightLeftTurnWaitingZoneStageApproach : public Stage {public:StageResult Process(const common::TrajectoryPoint& planning_init_point, Frame* frame) override;private:StageResult FinishStage(std::string next_stage);};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::TrafficLightLeftTurnWaitingZoneStageApproach,apollo::planning::Stage)} // namespace planning} // namespace apollo
- 开发第二个阶段,待转区行驶的阶段TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CREEP,实现待转区阶段的Process()函数:
- 在reference_line_info中设置该阶段的限速
- 如果通过了左转停止线,或者左转灯是绿灯则切入TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE阶段
文件路径:
planning/scenarios/traffic_light_left_turn_waiting_zone/stage_creep.cc
#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_creep.h"#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.h"#include <string>#include "modules/common_msgs/perception_msgs/traffic_light_detection.pb.h"#include "cyber/common/log.h"#include "modules/planning/planning_base/common/frame.h"#include "modules/planning/planning_base/common/planning_context.h"namespace apollo {namespace planning {using apollo::common::TrajectoryPoint;using apollo::hdmap::PathOverlap;using apollo::perception::TrafficLight;bool TrafficLightLeftTurnWaitingZoneStageCreep::Init(const StagePipeline& config,const std::shared_ptr<DependencyInjector>& injector,const std::string& config_dir,void* context) {CHECK_NOTNULL(context);bool ret = Stage::Init(config, injector, config_dir, context);if (!ret) {AERROR << Name() << "init failed!";return false;}return ret;}StageResult TrafficLightLeftTurnWaitingZoneStageCreep::Process(const TrajectoryPoint& planning_init_point,Frame* frame) {CHECK_NOTNULL(frame);CHECK_NOTNULL(context_);auto* context = GetContextAs<TrafficLightLeftTurnWaitingZoneContext>();const auto& scenario_config = context->scenario_config;auto& reference_line_info = frame->mutable_reference_line_info()->front();reference_line_info.LimitCruiseSpeed(scenario_config.creep_speed());StageResult result = ExecuteTaskOnReferenceLine(planning_init_point, frame);if (result.HasError()) {AERROR << "TrafficLightLeftTurnWaitingZoneStageCreep planning error";}hdmap::PathOverlap forward_traffic_light_overlap;hdmap::PathOverlap left_turn_traffic_light_overlap_first;hdmap::PathOverlap left_turn_traffic_light_overlap_second;const std::vector<hdmap::PathOverlap> traffic_light_overlaps= reference_line_info.reference_line().map_path().signal_overlaps();for (const auto& overlap : traffic_light_overlaps) {if (overlap.object_id == context->forward_traffic_light_id) {forward_traffic_light_overlap = overlap;} else if (overlap.object_id == context->left_turn_traffic_light_id) {if (left_turn_traffic_light_overlap_second.start_s < overlap.start_s) {std ::swap(left_turn_traffic_light_overlap_first, left_turn_traffic_light_overlap_second);left_turn_traffic_light_overlap_second = overlap;} else {left_turn_traffic_light_overlap_first = overlap;}}}const double adc_front_edge_s = reference_line_info.AdcSlBoundary().end_s();bool is_passed_left_turn_stop_line = adc_front_edge_s > left_turn_traffic_light_overlap_second.end_s;auto left_signal_color = frame->GetSignal(context->left_turn_traffic_light_id).color();auto done_traffic_light = injector_->planning_context()->mutable_planning_status()->mutable_traffic_light();done_traffic_light->mutable_done_traffic_light_overlap_id()->Clear();if (is_passed_left_turn_stop_line || left_signal_color == TrafficLight::GREEN) {reference_line_info.LimitCruiseSpeed(scenario_config.cruise_speed());return FinishStage();}return result.SetStageStatus(StageStatusType::RUNNING);}StageResult TrafficLightLeftTurnWaitingZoneStageCreep::FinishStage() {next_stage_ = "TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE";return StageResult(StageStatusType::FINISHED);}} // namespace planning} // namespace apollo
添加头文件modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_creep.h:
#pragma once#include <memory>#include <string>#include "cyber/plugin_manager/plugin_manager.h"#include "modules/planning/planning_base/scenario_base/stage.h"namespace apollo {namespace planning {class TrafficLightLeftTurnWaitingZoneStageCreep : public Stage {public:bool Init(const StagePipeline& config,const std::shared_ptr<DependencyInjector>& injector,const std::string& config_dir,void* context) override;StageResult Process(const common::TrajectoryPoint& planning_init_point, Frame* frame) override;private:StageResult FinishStage();};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::TrafficLightLeftTurnWaitingZoneStageCreep, Stage)} // namespace planning} // namespace apollo
- 开发第三个阶段通过交叉路口TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE:
- 该阶段可以继承当前已有的交叉路口阶段基类BaseStageTrafficLightCruise
- 设置当前阶段限速
- 这一阶段将无视红绿灯信息,因此将直行灯和左转灯都加入到add_done_traffic_light_overlap_id
文件路径:
planning/scenarios/traffic_light_left_turn_waiting_zone/stage_intersection_cruise.cc
#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_intersection_cruise.h"#include "modules/planning/scenarios/traffic_light_left_turn_waiting_zone/traffic_light_left_turn_waiting_zone.h"#include "cyber/common/log.h"namespace apollo {namespace planning {StageResult TrafficLightLeftTurnWaitingZoneStageIntersectionCruise::Process(const common::TrajectoryPoint& planning_init_point,Frame* frame) {const auto* context = GetContextAs<TrafficLightLeftTurnWaitingZoneContext>();const auto& scenario_config = context->scenario_config;auto& reference_line_info = frame->mutable_reference_line_info()->front();reference_line_info.LimitCruiseSpeed(scenario_config.cruise_speed());StageResult result = ExecuteTaskOnReferenceLine(planning_init_point, frame);auto done_traffic_light = injector_->planning_context()->mutable_planning_status()->mutable_traffic_light();done_traffic_light->mutable_done_traffic_light_overlap_id()->Clear();done_traffic_light->add_done_traffic_light_overlap_id(context->forward_traffic_light_id);done_traffic_light->add_done_traffic_light_overlap_id(context->left_turn_traffic_light_id);if (result.HasError()) {AERROR << "TrafficLightLeftTurnWaitingZoneStageIntersectionCruise "<< "plan error";}bool stage_done = CheckDone(*frame, injector_->planning_context(), true);if (stage_done) {return FinishStage();}return result.SetStageStatus(StageStatusType::RUNNING);}StageResult TrafficLightLeftTurnWaitingZoneStageIntersectionCruise::FinishStage() {return FinishScenario();}} // namespace planning} // namespace apollo
添加头文件modules/planning/scenarios/traffic_light_left_turn_waiting_zone/stage_intersection_cruise.h:
#pragma once#include <string>#include "cyber/plugin_manager/plugin_manager.h"#include "modules/planning/planning_base/scenario_base/traffic_light_base/base_stage_traffic_light_cruise.h"namespace apollo {namespace planning {class TrafficLightLeftTurnWaitingZoneStageIntersectionCruise : public BaseStageTrafficLightCruise {public:StageResult Process(const common::TrajectoryPoint& planning_init_point, Frame* frame) override;private:StageResult FinishStage();};CYBER_PLUGIN_MANAGER_REGISTER_PLUGIN(apollo::planning::TrafficLightLeftTurnWaitingZoneStageIntersectionCruise, Stage)} // namespace planning} // namespace apollo
- 完成场景的流水线配置conf/pipeline.pb.txt,配置需要启动的阶段,和每个阶段用到的任务
文件路径
planning/scenarios/traffic_light_left_turn_waiting_zone/conf/pipeline.pb.txt
stage: {name: "TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_APPROACH"type: "TrafficLightLeftTurnWaitingZoneStageApproach"enabled: truetask {name: "LANE_FOLLOW_PATH"type: "LaneFollowPath"}task {name: "FALLBACK_PATH"type: "FallbackPath"}task {name: "PATH_DECIDER"type: "PathDecider"}task {name: "RULE_BASED_STOP_DECIDER"type: "RuleBasedStopDecider"}task {name: "SPEED_BOUNDS_PRIORI_DECIDER"type: "SpeedBoundsDecider"}task {name: "SPEED_HEURISTIC_OPTIMIZER"type: "PathTimeHeuristicOptimizer"}task {name: "SPEED_DECIDER"type: "SpeedDecider"}task {name: "SPEED_BOUNDS_FINAL_DECIDER"type: "SpeedBoundsDecider"}task {name: "PIECEWISE_JERK_SPEED"type: "PiecewiseJerkSpeedOptimizer"}}stage: {name: "TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CREEP"type: "TrafficLightLeftTurnWaitingZoneStageCreep"enabled: truetask {name: "LANE_FOLLOW_PATH"type: "LaneFollowPath"}task {name: "FALLBACK_PATH"type: "FallbackPath"}task {name: "PATH_DECIDER"type: "PathDecider"}task {name: "RULE_BASED_STOP_DECIDER"type: "RuleBasedStopDecider"}task {name: "SPEED_BOUNDS_PRIORI_DECIDER"type: "SpeedBoundsDecider"}task {name: "SPEED_HEURISTIC_OPTIMIZER"type: "PathTimeHeuristicOptimizer"}task {name: "SPEED_DECIDER"type: "SpeedDecider"}task {name: "SPEED_BOUNDS_FINAL_DECIDER"type: "SpeedBoundsDecider"}task {name: "PIECEWISE_JERK_SPEED"type: "PiecewiseJerkSpeedOptimizer"}}stage: {name: "TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE_CRUISE"type: "TrafficLightLeftTurnWaitingZoneStageIntersectionCruise"enabled: truetask {name: "LANE_FOLLOW_PATH"type: "LaneFollowPath"}task {name: "FALLBACK_PATH"type: "FallbackPath"}task {name: "PATH_DECIDER"type: "PathDecider"}task {name: "RULE_BASED_STOP_DECIDER"type: "RuleBasedStopDecider"}task {name: "ST_BOUNDS_DECIDER"type: "STBoundsDecider"}task {name: "SPEED_BOUNDS_PRIORI_DECIDER"type: "SpeedBoundsDecider"}task {name: "SPEED_HEURISTIC_OPTIMIZER"type: "PathTimeHeuristicOptimizer"}task {name: "SPEED_DECIDER"type: "SpeedDecider"}task {name: "SPEED_BOUNDS_FINAL_DECIDER"type: "SpeedBoundsDecider"}task {name: "PIECEWISE_JERK_SPEED"type: "PiecewiseJerkSpeedOptimizer"}}
- 添加场景的参数文件
- 将场景用到的参数配置到一个proto文件
文件路径:
planning/scenarios/traffic_light_left_turn_waiting_zone/proto/traffic_light_left_turn_waiting_zone.proto
syntax = "proto2";package apollo.planning;message TrafficLightLeftTurnWaitingZoneConfig {optional double start_traffic_light_scenario_distance = 1; // meteroptional double approach_speed = 2;optional double creep_speed = 3;optional double cruise_speed = 4;}
- 修改配置的编译文件BUILD,将其编译为一个
文件路径:
proto_library(planning/scenarios/traffic_light_left_turn_waiting_zone/proto/BUILD
load("@rules_cc//cc:defs.bzl", "cc_binary", "cc_library")load("//tools:apollo_package.bzl", "apollo_cc_library", "apollo_package", "apollo_plugin")load("//tools/proto:proto.bzl", "proto_library")load("//tools:cpplint.bzl", "cpplint")package(default_visibility = ["//visibility:public"])proto_library(name = "traffic_light_left_turn_waiting_zone_proto",srcs = ["traffic_light_left_turn_waiting_zone.proto"],)apollo_package()cpplint()
- 将场景的参数配置添加到planning/scenarios/traffic_light_left_turn_waiting_zone/conf/scenario_conf.pb.txt中
start_traffic_light_scenario_distance: 30.0approach_speed:5.0creep_speed: 3.0cruise_speed:8.0
- 将添加的scenario和stage插件注册到文件中
modules/planning/scenarios/traffic_light_left_turn_waiting_zone/plugin_traffic_light_left_turn_waiting_zone_description.xml
<library path="modules/planning/scenarios/traffic_light_left_turn_waiting_zone/libtraffic_light_left_turn_waiting_zone.so"><class type="apollo::planning::TrafficLightLeftTurnWaitingZone" base_class="apollo::planning::Scenario"></class><class type="apollo::planning::TrafficLightLeftTurnWaitingZoneStageApproach" base_class="apollo::planning::Stage"></class><class type="apollo::planning::TrafficLightLeftTurnWaitingZoneStageCreep" base_class="apollo::planning::Stage"></class><class type="apollo::planning::TrafficLightLeftTurnWaitingZoneStageIntersectionCruise" base_class="apollo::planning::Stage"></class></library>
- 将左转待转场景加入到planning的场景管理流水线中
文件路径:
profiles/current/modules/planning/planning_base/conf/planning_config.pb.txt
topic_config {chassis_topic: "/apollo/canbus/chassis"hmi_status_topic: "/apollo/hmi/status"localization_topic: "/apollo/localization/pose"planning_pad_topic: "/apollo/planning/pad"planning_trajectory_topic: "/apollo/planning"prediction_topic: "/apollo/prediction"relative_map_topic: "/apollo/relative_map"routing_request_topic: "/apollo/external_command/lane_follow"routing_response_topic: "/apollo/routing_response"planning_command_topic: "/apollo/planning/command"story_telling_topic: "/apollo/storytelling"traffic_light_detection_topic: "/apollo/perception/traffic_light"planning_learning_data_topic: "/apollo/planning/learning_data"}# NO_LEARNING / E2E / HYBRID / RL_TEST / E2E_TEST / HYBRID_TESTlearning_mode: NO_LEARNINGreference_line_config {pnc_map_class: "apollo::planning::LaneFollowMap"}standard_planning_config {planner_type: PUBLIC_ROADplanner_public_road_config {scenario {name: "EMERGENCY_PULL_OVER"type: "EmergencyPullOverScenario"}scenario {name: "EMERGENCY_STOP"type: "EmergencyStopScenario"}scenario {name: "VALET_PARKING"type: "ValetParkingScenario"}scenario {name: "BARE_INTERSECTION_UNPROTECTED"type: "BareIntersectionUnprotectedScenario"}scenario {name: "STOP_SIGN_UNPROTECTED"type: "StopSignUnprotectedScenario"}scenario {name: "YIELD_SIGN"type: "YieldSignScenario"}scenario {name: "TRAFFIC_LIGHT_LEFT_TURN_WAITING_ZONE"type: "TrafficLightLeftTurnWaitingZone"}scenario {name: "TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN"type: "TrafficLightUnprotectedLeftTurnScenario"}scenario {name: "TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN"type: "TrafficLightUnprotectedRightTurnScenario"}scenario {name: "TRAFFIC_LIGHT_PROTECTED"type: "TrafficLightProtectedScenario"}scenario {name: "PULL_OVER"type: "PullOverScenario"}scenario {name: "PARK_AND_GO"type: "ParkAndGoScenario"}scenario {name: "LANE_FOLLOW"type: "LaneFollowScenario"}}}
- 开发一个仿真测试的脚本,通过键盘输入来控制信号灯的变换。
文件路径:
modules/planning/scenarios/traffic_light_left_turn_waiting_zone/tools/manual_traffic_light.py
from cyber.python.cyber_py3 import cyberfrom cyber.python.cyber_py3 import cyber_timeimport modules.common_msgs.perception_msgs.traffic_light_detection_pb2 as traffic_light_detection_pb2import threadingimport timedef add_left_light(color, traffic_light_pb):light = traffic_light_pb.traffic_light.add()light.color = colorlight.id = "451089192"light.tracking_time = 10.0def add_forward_light(color, traffic_light_pb):light = traffic_light_pb.traffic_light.add()light.color = colorlight.id = "451089193"light.tracking_time = 10.0seq_num = 0def add_header(msg):global seq_nummsg.header.sequence_num = seq_nummsg.header.timestamp_sec = cyber_time.Time.now().to_sec()msg.header.module_name = "manual_traffic_light"seq_num = seq_num + 1def pub_func(writer):while not cyber.is_shutdown():global traffic_light_msgadd_header(traffic_light_msg)writer.write(traffic_light_msg)time.sleep(0.1)traffic_light_msg = Noneif __name__ == '__main__':traffic_light_msg = traffic_light_detection_pb2.TrafficLightDetection()cyber.init()node = cyber.Node("traffic_light_command")writer = node.create_writer("/apollo/perception/traffic_light", traffic_light_detection_pb2.TrafficLightDetection)thread = threading.Thread(target=pub_func, args=(writer,))thread.start()while not cyber.is_shutdown():m = input("1: all red 2: forward green 3: left green 4:all green\n")traffic_light_msg.ClearField('traffic_light')print(m)if m == '1':add_left_light(traffic_light_detection_pb2.TrafficLight.RED, traffic_light_msg)add_forward_light(traffic_light_detection_pb2.TrafficLight.RED, traffic_light_msg)elif m == "2":add_left_light(traffic_light_detection_pb2.TrafficLight.RED, traffic_light_msg)add_forward_light(traffic_light_detection_pb2.TrafficLight.GREEN, traffic_light_msg)elif m == "3":add_left_light(traffic_light_detection_pb2.TrafficLight.GREEN, traffic_light_msg)add_forward_light(traffic_light_detection_pb2.TrafficLight.RED, traffic_light_msg)elif m == "4":add_left_light(traffic_light_detection_pb2.TrafficLight.GREEN, traffic_light_msg)add_forward_light(traffic_light_detection_pb2.TrafficLight.GREEN, traffic_light_msg)cyber.shutdown()
- 修改BUILD文件,配置编译依赖。
- 将包内所有代码编译为一个apollo的插件,添加代码中所有对基础库的依赖
load("@rules_cc//cc:defs.bzl", "cc_binary", "cc_library")load("//tools:apollo.bzl", "cyber_plugin_description")load("//tools:apollo_package.bzl", "apollo_cc_library", "apollo_package", "apollo_plugin")load("//tools/proto:proto.bzl", "proto_library")load("//tools:cpplint.bzl", "cpplint")package(default_visibility = ["//visibility:public"])filegroup(name = "left_turn_waiting_zone_files",srcs = glob(["conf/**",]),)apollo_plugin(name = "libtraffic_light_left_turn_waiting_zone.so",srcs = ["stage_approach.cc","stage_creep.cc","stage_intersection_cruise.cc","traffic_light_left_turn_waiting_zone.cc",],hdrs = ["stage_approach.h","stage_creep.h","stage_intersection_cruise.h","traffic_light_left_turn_waiting_zone.h",],copts = ["-DMODULE_NAME=\\\"planning\\\""],description = ":plugin_traffic_light_left_turn_waiting_zone_description.xml",deps = ["//cyber","//modules/common/util:common_util","//modules/common/util:util_tool","//modules/common_msgs/planning_msgs:planning_cc_proto","//modules/map:apollo_map","//modules/planning/planning_base:apollo_planning_planning_base","//modules/planning/scenarios/traffic_light_left_turn_waiting_zone/proto:traffic_light_left_turn_waiting_zone_cc_proto",],)apollo_package()cpplint()
- 编译开发好的包
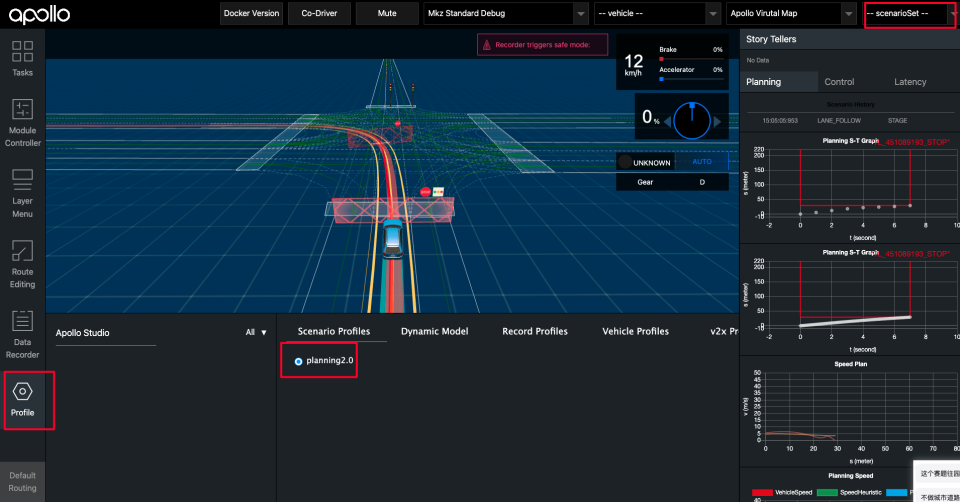
- 在Dreamview仿真验证
- 选择planning2.0场景集,左转待转场景
- 将车放置在地图左下角的路口,左转车道上
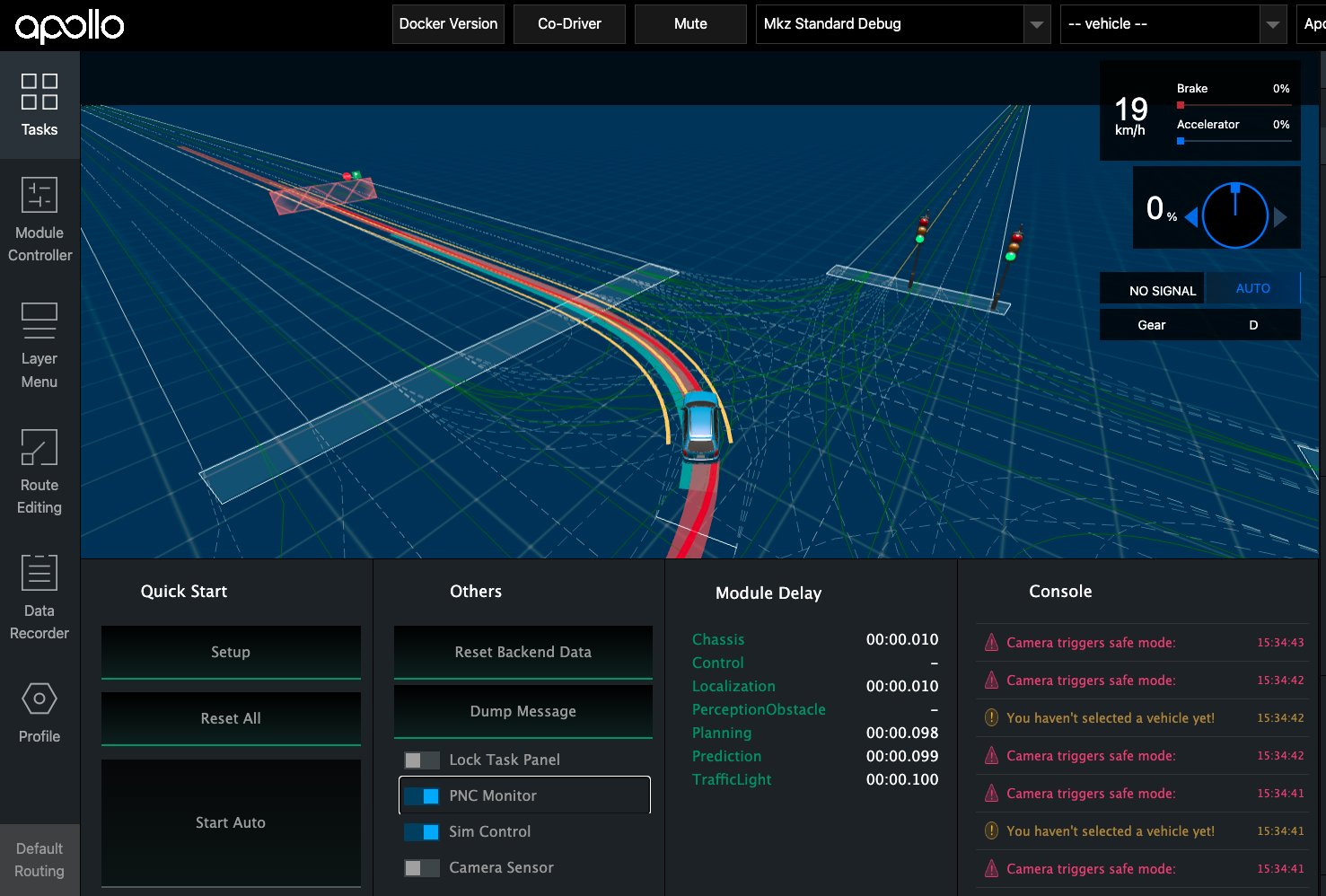
- 打开planning模块
- 在终端启动红绿灯脚本,使直行灯和左转灯都为红色
- 发送目标车道的路由请求

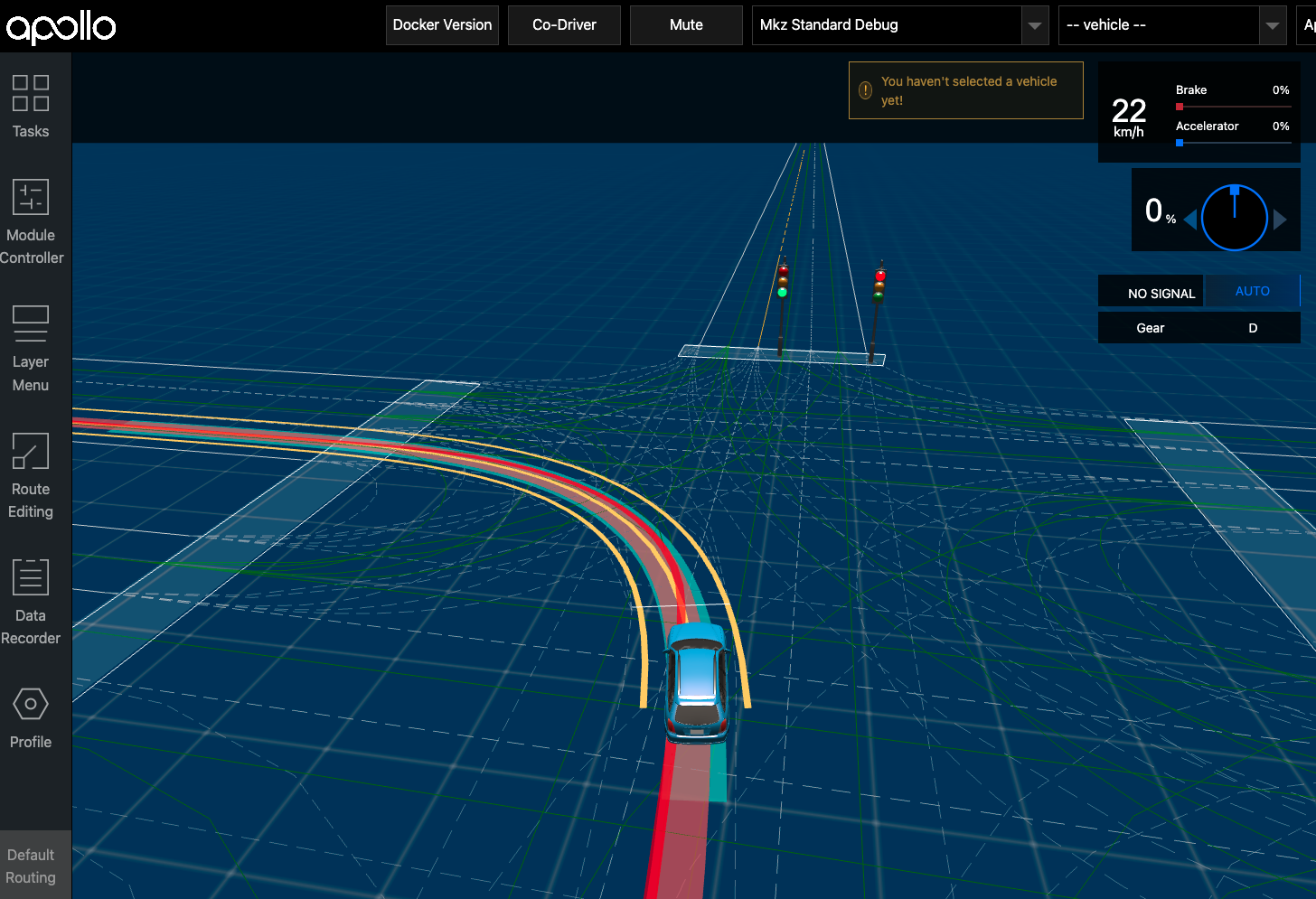
- 车辆行驶到停止线后,修改为直行绿灯左转红灯
在终端输入:2
现象:
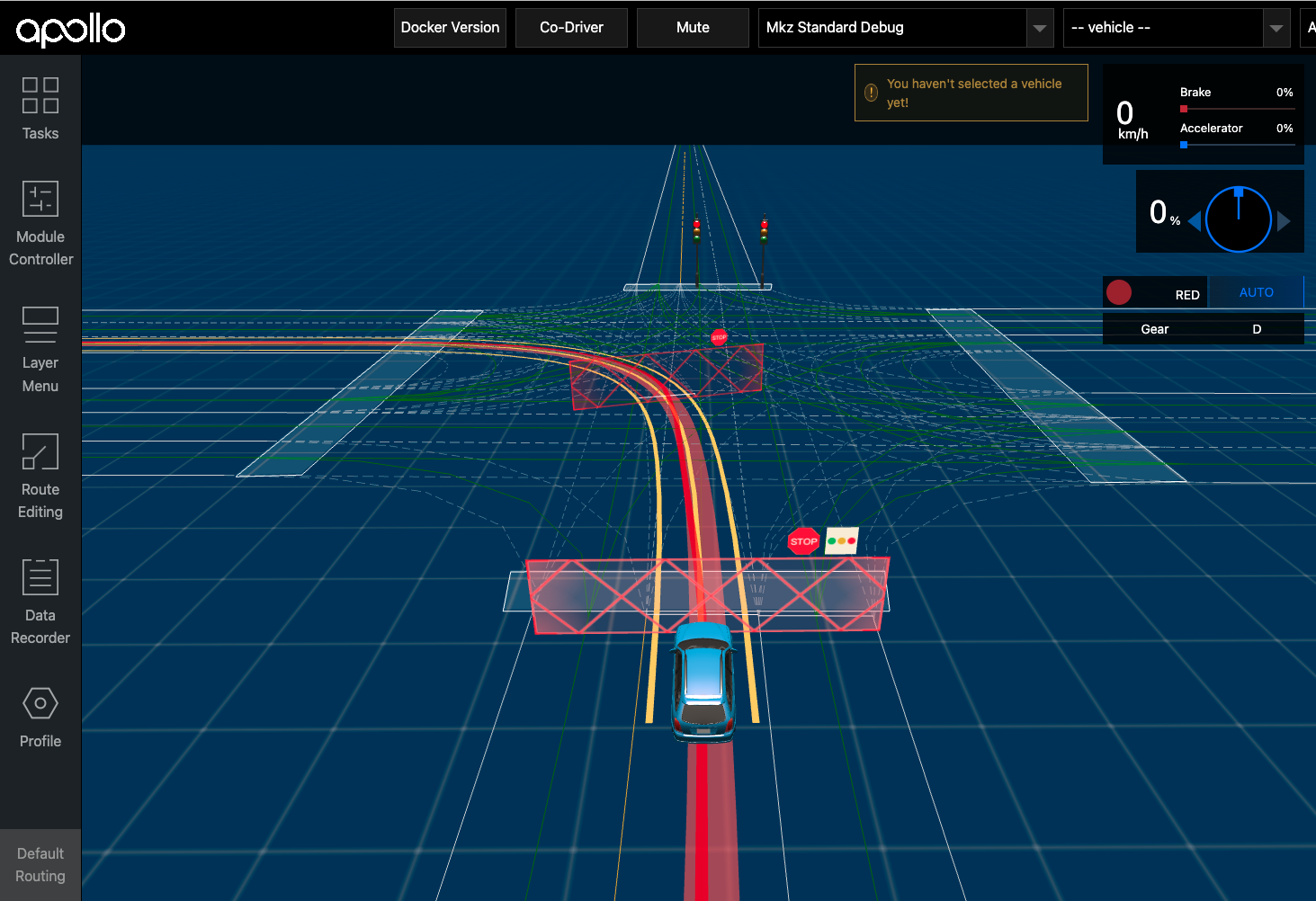
- 车辆行驶到左转区停止线后,修改为左转绿灯
在终端输入:3

现象:
- 重新仿真测试,当直行区左转灯是绿灯时测试效果
- 重新仿真测试,当左转区由绿灯变成红灯测试效果
云实验链接:
该实践内容已经上线Apollo云实验室,开快速启动进行实践体验: https://apollo.baidu.com/community/course/25
