包管理安装方式
步骤一:安装基础软件
1. 安装 Ubuntu Linux
安装 Ubuntu 18.04+ 的步骤,参见 官方安装指南。
完成安装后更新相关软件:
sudo apt-get update
sudo apt-get upgrade
注意:若要完成更新,需要保证网络连接。
2. 安装 Docker Engine
Apollo 依赖于 Docker 19.03+。安装 Docker 引擎,您可以根据官方文档进行安装:
wget http://apollo-pkg-beta.bj.bcebos.com/docker_install.sh
bash docker_install.sh
这个过程可能会运行多次脚本,根据脚本提示执行即可。
步骤二(可选):获取 GPU 支持
Apollo某些模块需要GPU的支持才能够编译、运行(例如感知模块),如果您需要使用此类模块,需要安装Nvidia显卡驱动以及Nvidia container toolkit以获取GPU支持。
注意:本教程只适用于ubuntu系统,虚拟机无法安装显卡驱动,wsl请自行上网搜索 注意:如果您之前已经安装过Nvidia显卡驱动,即往终端输入nvidia-smi能够正常输出,可以跳过1.安装显卡驱动小节
1.安装驱动
可参照官网方法安装驱动官网驱动。
显卡驱动和CUDA版本兼容性,由于nvidia的硬件更新的很快,因此会遇到显卡驱动和CUDA版本不兼容的情况,以下为我们测试的畅通链路。
| 显卡系列 | 测试显卡 | 驱动版本 | 最低支持驱动版本 | cuda版本 |
| GeForce 10 Series | GeForce GTX 1080 | nvidia-driver-470.160.03 | nvidia-driver-391.35 | CUDA Version :11.4 |
| GeForce RTX 20 Series | GeForce RTX 2070 SUPER | nvidia-driver-470.63.01 | nvidia-driver-456.38 | CUDA Version :11.4 |
| GeForce RTX 30 Series | GeForce RTX 3090 | nvidia-driver-515.86.01 | nvidia-driver-460.89 | CUDA Version :11.6 |
| GeForce RTX 30 Series | GeForce RTX 3060 | nvidia-driver-470.63.01 | nvidia-driver-460.89 | CUDA Version :11.4 |
| Tesla V-Series | Tesla V100 | nvidia-driver-418.67 | nvidia-driver-410.129 | CUDA Version :10.1 |
| AMD | MI100 dGPU | ROCm™ 3.10 driver | | |
10、20、30系列显卡推荐使用470.63.01版本的驱动 ,您可以通过Nvidia官网来下载驱动
下载之后,找到相应的文件夹打开终端输入安装指令:
sudo chmod 777 NVIDIA-Linux-x86_64-470.63.01.run
sudo ./NVIDIA-Linux-x86_64-470.63.01.run
安装完毕后,您可以通过nvidia-smi指令来检查驱动是否安装成功,如果一切正常,您可以看到类似以下的提示:
Tue Jan 3 12:04:21 2023
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 460.91.03 Driver Version: 470.63.01 CUDA Version: 11.4 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|===============================+======================+======================|
| 0 GeForce GTX 1080 Off | 00000000:01:00.0 Off | N/A |
| 0% 38C P8 7W / 198W | 239MiB / 8118MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
| 0 N/A N/A 2566 G /usr/lib/xorg/Xorg 18MiB |
| 0 N/A N/A 2657 G /usr/bin/gnome-shell 67MiB |
| 0 N/A N/A 6104 G /usr/lib/xorg/Xorg 132MiB |
| 0 N/A N/A 6234 G /usr/bin/gnome-shell 13MiB |
| 0 N/A N/A 7440 G gnome-control-center 1MiB |
+-----------------------------------------------------------------------------+
2. 安装 Nvidia container toolkit
为了在容器内获得 GPU 支持,在安装完 docker 后需要安装 NVIDIA Container Toolkit。 运行以下指令安装 NVIDIA Container Toolkit:
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get -y update
sudo apt-get install -y nvidia-docker2
安装完毕后,需要手动重启下docker:
sudo systemctl restart docker
步骤三:安装 Apollo 环境管理工具
Apollo 环境管理工具是一个帮忙管理和启动 Apollo 环境容器的命令行工具。
1. 安装依赖软件
sudo apt-get update
sudo apt-get install ca-certificates curl gnupg
2. 在宿主机添加 Apollo 软件源的 gpg key,并设置好源和更新
# 添加 gpg key
sudo install -m 0755 -d /etc/apt/keyrings
curl -fsSL https://apollo-pkg-beta.cdn.bcebos.com/neo/beta/key/deb.gpg.key | sudo gpg --dearmor -o /etc/apt/keyrings/apolloauto.gpg
sudo chmod a+r /etc/apt/keyrings/apolloauto.gpg
# 设置源并更新
echo \
"deb [arch="$(dpkg --print-architecture)" signed-by=/etc/apt/keyrings/apolloauto.gpg] https://apollo-pkg-beta.cdn.bcebos.com/apollo/core"\
$(. /etc/os-release && echo "$VERSION_CODENAME") "main" | \
sudo tee /etc/apt/sources.list.d/apolloauto.list
sudo apt-get update
注:如果之前已经安装过8.0版本的apollo的话,在宿主机上的/etc/apt/sources.list文件中会有形如 deb https://apollo-pkg-beta.cdn.bcebos.com/neo/beta bionic main的配置,可以直接删除,宿主机上的apollo源配置仅用于安 装aem工具
3. 安装aem:
sudo apt install apollo-neo-env-manager-dev --reinstall
安装成功后即可使用
步骤四:安装示例工程
1. 选择示例工程
Apollo 目前提供了3个示例工程,您可以根据需要选择其一
2. 克隆工程
以 x86 架构的 application-core 为例
git clone https://github.com/ApolloAuto/application-core.git application-core
3. 启动 Apollo 环境容器
# 先进入工程目录
cd application-core
# 环境设置:识别主机系统是x86_64还是aarch64, 并修改对应的.env和.workspace.json配置
bash setup.sh
# 启动容器
aem start
4. 进入 Apollo 环境容器
# 先进入工程目录
cd application-core
# 进入容器
aem enter
5. 安装软件包
示例工程中包含一个名为 core 目录,其中 core/cyberfile.xml 文件中描述了工程所依赖软件包,可以通过 buildtool 工具进行依赖包的安装
此操作真正含义是编译工程中 core 这个包,但 core 本身并没有需要编译的代码,所以此操作仅会安装 core/cyberfile.xml 中声明的依赖包
6. 选择车型配置
示例工程中profiles/sample目录是官方提供的基于一个雷达两个摄像头的车型配置,您可以参考profiles目录下的sample编写自己的车型配置,生效车型配置的方法如下:
# 以sample为例
aem profile use sample
7. 播放数据包
获取数据包
wget https://apollo-system.cdn.bcebos.com/dataset/6.0_edu/demo_3.5.record -P $HOME/.apollo/resources/records/
获取数据包对应的地图
buildtool map get sunnyvale
从 9.0.0-rc-r10 版本开始,地图数据已经被分离出来,需要单独下载,不再随地图包发布;通过 buildtool map list 可以查看所有可用的地图
启动 Dreamview+
aem bootstrap start --plus
在 Dreamview+ 中播放数据包
启动 Dreamview+ 之后,在浏览器输入 localhost:8888 进入 Dreamview+ 界面,您可以选择默认模式,也可以选择其他模式播放数据包。本小节以默认模式为例。
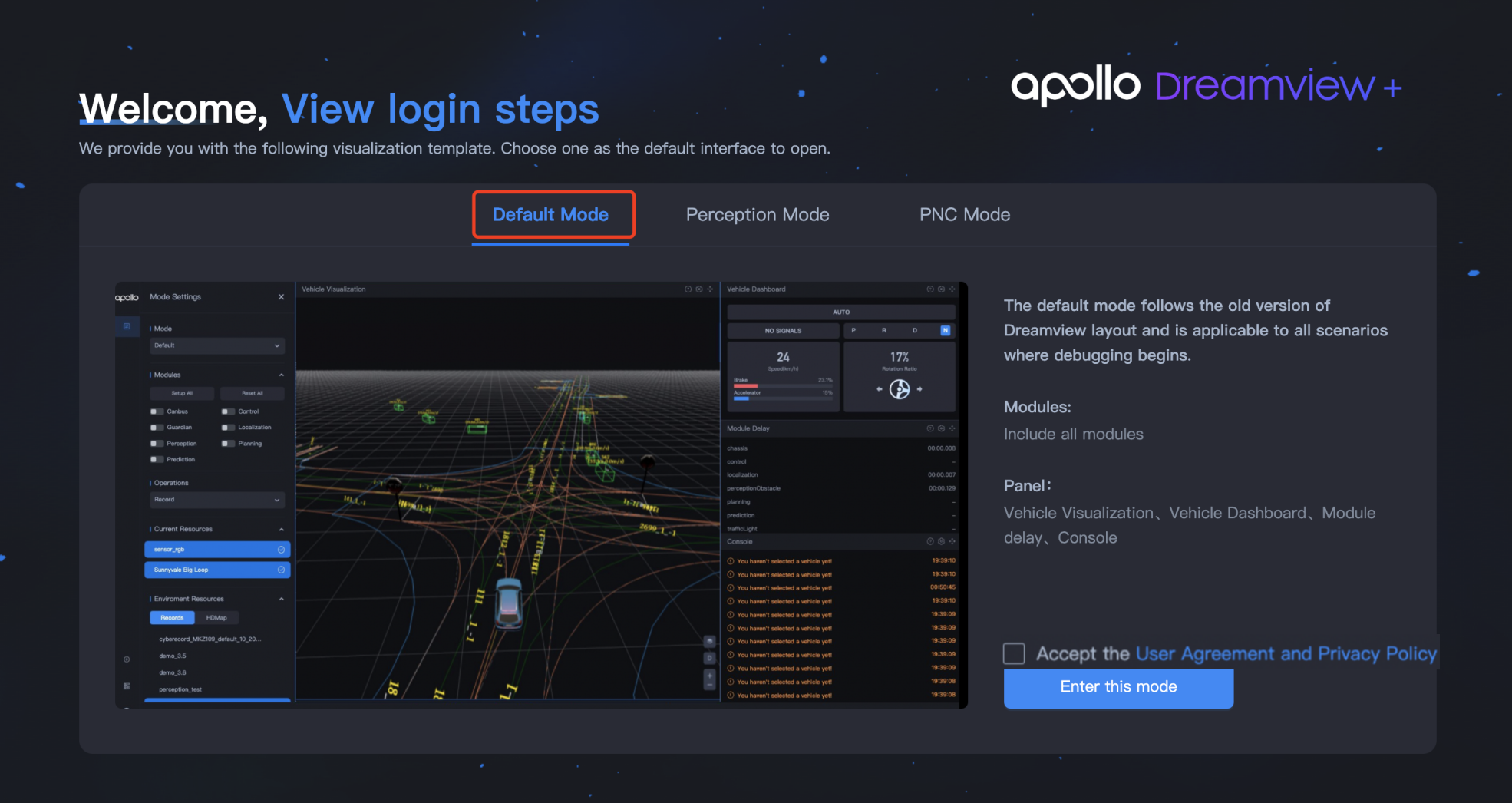
- 选择 Default Mode 。
- 勾选 Accept the User Agreement and Privacy Policy/接受用户协议和隐私政策 ,并单击 Enter this Mode 进入 Mode Settings/模式设置 页面。
- 在 Mode Settings/模式设置 页面,设置播包参数。
- 在 Operations/操作 中选择 Record 。
- 在 Environment Resources/环境资源 中,单击 Records/数据包 ,并选择具体想要播放的数据包。
- 在 Environment Resources/环境资源 中,单击 HDMap/高精地图 ,并选择 Sunnyvale Big Loop 。
单击底部区域播放按钮。
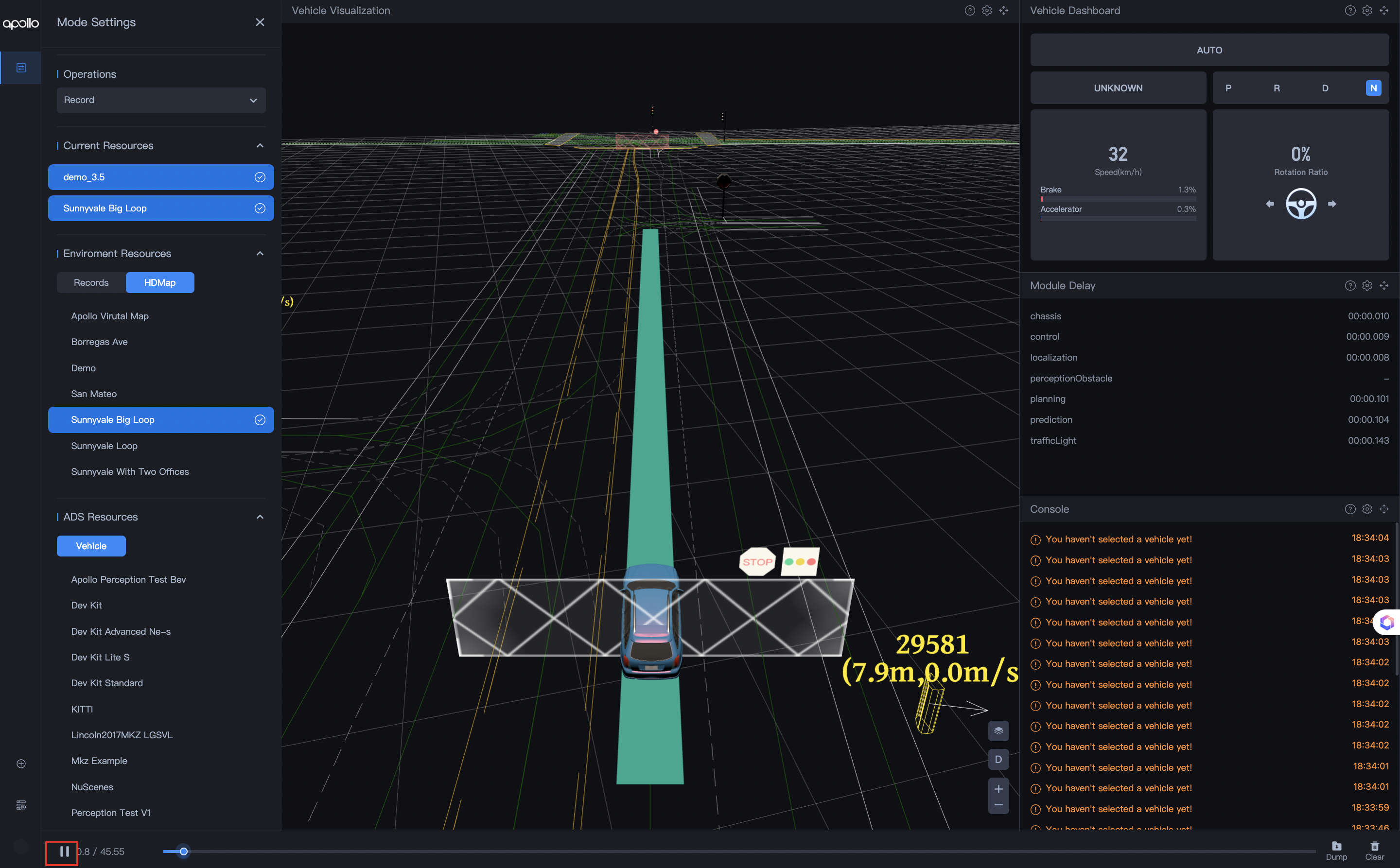
可以在 Vehicle Visualization/车辆可视化 中看到数据包播放的画面。
通过命令行播放数据包
- 进入 docker 环境,
在 Dreamview+ 中 Resource Manager/资源管理 > Records/数据包 中先下载需要的数据包。输入以下命令播放数据包:
cyber_recorder play -f ~/.apollo/resources/records/数据包名称 -l
注意:如果您想要循环播放数据包,添加 -l,如果不循环播放数据包,则不需要添加 -l。
8. 安装目录结构说明
至此,Apollo 安装已经完成
整个工程的目录结构如下
application-core
├── .aem
│ └── envroot
│ ├── apollo # 会挂载到容器内的 /apollo 目录
│ └── opt # 会挂载到容器内的 /opt/ 目录,而 Apollo 的软件包会默认安装到 /opt/ 下,因此该目录可以起到缓存的作用
├── core # 工程依赖包
│ ├── BUILD
│ └── cyberfile.xml # 包的描述文件,描述整个工程的所有依赖
├── CPPLINT.cfg
├── data # 数据目录,会挂载到 /apollo/data
│ ├── calibration_data # 标定配置目录,会挂载到 /apollo/modules/calibration/data
│ ├── kv_db.sqlite
│ ├── log # 日志目录,会挂载到 /opt/apollo/neo/data/log
│ └── map_data # 地图目录,会挂载到 /apollo/modules/map/data
├── profiles # 新版配置目录
│ ├── current -> sample # 当前启用的配置目录
│ └── sample # 官方提供的单lidar和两个camera样例车型配置
├── third_party
├── tools -> /opt/apollo/neo/packages/bazel-extend-tools/latest/src
├── .vscode # 默认的 vscode 配置
│ ├── c_cpp_properties.json
│ └── settings.json
├── WORKSPACE # bazel 的配置
└── .workspace.json # apollo 工程配置,可以在这指定软件包版本
接下来,您可以通过实践教程来学习放了解更多 Apollo 的使用方法
步骤六:删除工程(可选)
此步骤说明如何删除已安装的工程
1. 删除容器
以 application-core 工程为例
# 先进入工程目录
cd application-core
# 删除容器
aem remove
2. 删除工程
# 回到上一级目录
cd ..
# 删除工程目录
rm -r application-core
文档意见反馈
如果您在使用文档的过程中,遇到任何问题,请到我们在【开发者社区】建立的 反馈意见收集问答页面,反馈相关的问题。我们会根据反馈意见对文档进行迭代优化。