第二章:激光雷达感知功能调试
内容导入:
激光雷达和相机是目前自动驾驶中最重要的2个传感器,由于激光雷达测距准确,因此检测出的障碍物的精度普遍会比相机高。
激光雷达(Laser Radar,简称LiDAR)是一种通过激光束来探测目标位置、反射强度等特征量的传感器。它由激光发射机、光学接收机、转台和信息处理系统等组成。激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
激光雷达相比传统雷达,具有高分辨率、高精度、抗有源干扰能力强等优点。它的工作原理是利用激光的波长和脉冲宽度,通过测量光的传播时间来精确测量距离。激光雷达的发射系统口径很小,可接收区域窄,有意发射的激光干扰信号进入接收机的概率极低。
根据扫描系统的差异,激光雷达可以分为机械式、混合固态(转镜式、棱镜式、MEMS振镜)、固态(FLASH、OPA)等。根据测距方法的差异,就可以分为TOF激光雷达、FMCW激光雷达。
2.1 激光雷达感知整体框架
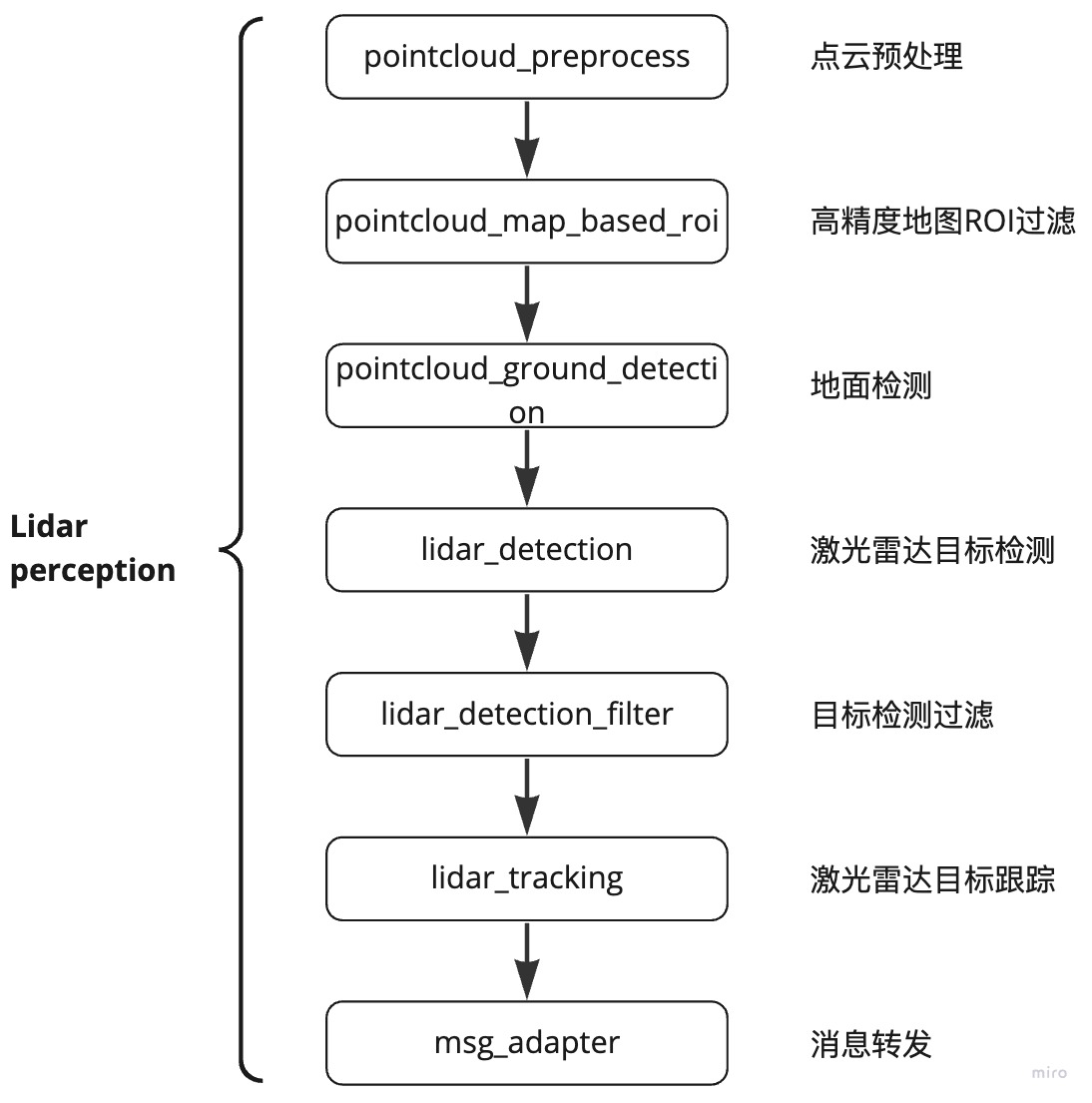
Apollo激光雷达的感知由以下几个组件构成,它们一起工作共同实现了激光雷达感知功能。
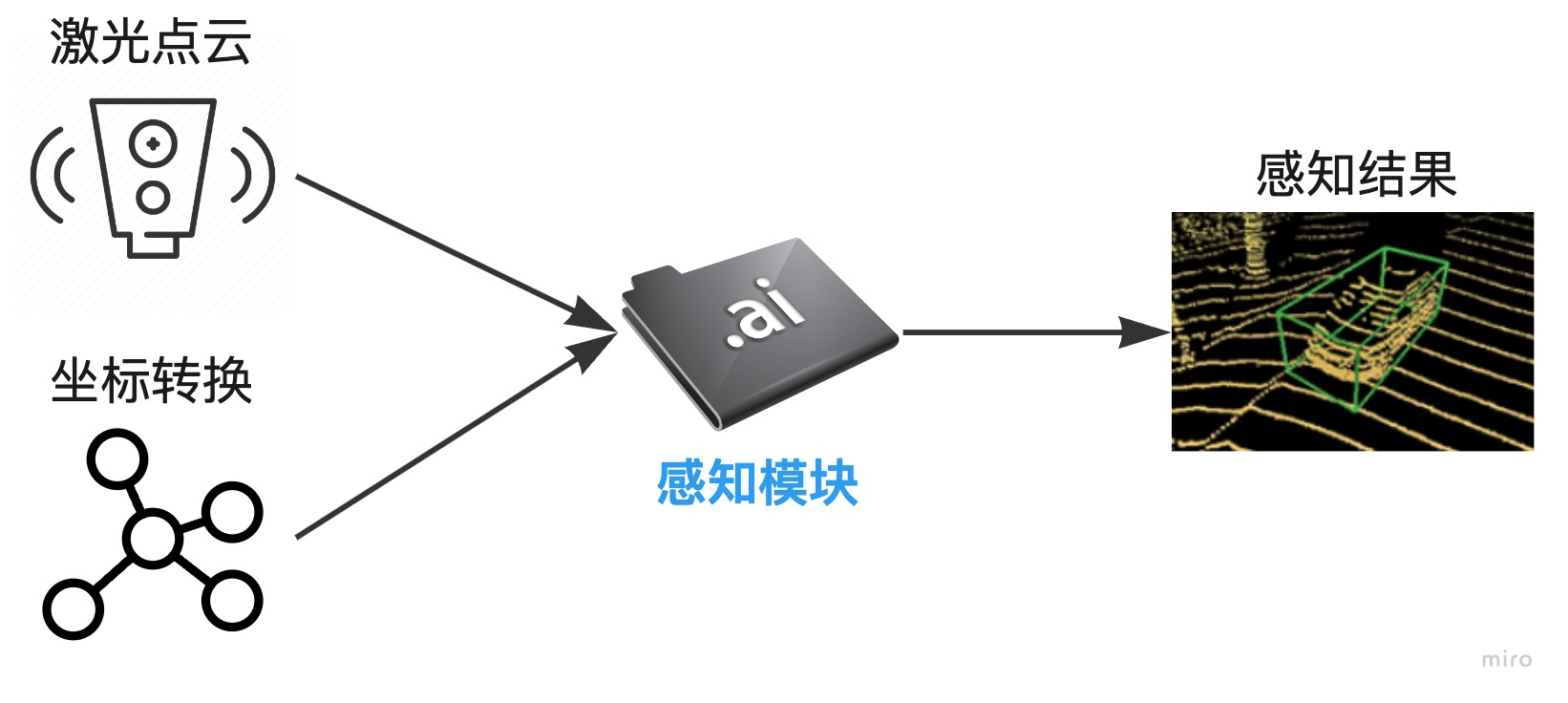
在介绍各个模块之前,我们首先需要知道激光雷达感知模块的输入和输出,以及它的工作原理。
激光雷达感知模块的输入:
- 激光雷达点云。由激光雷达传感器生成,通过扫描周围环境得到一系列的点和反射强度值。订阅消息的通道
/apollo/sensor/lidar16/compensator/PointCloud2 - 坐标转换。检测到的障碍物在激光雷达坐标系,需要转换到世界坐标系下,因此需要激光雷达到世界坐标的转换关系。订阅消息的通道
/tf和/tf_static
激光雷达感知模块的输出:
- 障碍物信息。通过点云检测到的障碍物信息,包括目标的类别,大小,速度以及追踪ID等,用于后续的规划模块进行路径规划。发布消息的通道为
/apollo/perception/obstacles
接下来我们详细介绍这几个模块。
2.1.1 点云预处理(pointcloud_preprocess)
点云预处理是激光雷达感知的第一个组件,它的主要功能如下:
- 过滤无效点,即过滤坐标为nan的点
- 过滤高度超过z_threshold的点。比如过滤高度大于6米的点。
- 通过自车的点,考虑到激光雷达安装位置,有可能扫描到自己,因此过滤自身的点,避免误当作障碍物。
2.1.2 高精度地图过滤(pointcloud_map_based_roi)
过滤 ROI 之外的点云。
感兴趣区域 (ROI) 指定可行驶区域,包括从高精地图检索到的路面和路口。 HDMap ROI 过滤器处理 ROI 外部的lidar点,去除背景物体,例如道路周围的建筑物和树木。 剩下的就是ROI中的点云以供后续处理。
2.1.3 地面检测(pointcloud_ground_detection)
查找地面,查找地面的目的主要是为了后续做点云分割。

2.1.4 3D目标检测(lidar_detection)
通过深度学习算法,对上述处理过的点云进行目标检测,最后得到当前场景下的行人、车辆和非机动车辆的位置和速度信息等。
目前Apollo一共支持以下4种激光雷达目标检测模型。
- center_point_detection 是一种基于点云的anchor-free的三维目标检测算法,该模型在计算效率和准确度上有一定的优势。其核心思想是通过预测物体的中心点来进行目标检测和位置回归,而不需要预先产生大量候选框(anchor)。
- cnn_segmentation 自研模型
- mask_pillars_detection 自研模型,基于point_pillars做了一些改进。
- point_pillars_detection 是一种用于自动驾驶的3D目标检测模型,它基于点云数据实现。该模型通过将点云数据转化为柱形稀疏表示,然后结合2D CNN和3D SSD来进行目标检测。
目前支持的在线推理框架有
- pytorch
- paddle
- onnx
- TensorRT
已经开放训练代码的模型是center_point激光雷达检测模型,后续第4讲会讲到如何进行模型训练和部署。
2.1.5 检测结果过滤(lidar_detection_filter)
根据对象属性、车道线、ROI 等过滤模型检测出的前景和背景障碍物。
2.1.6 目标追踪(lidar_tracking)
对检测到的障碍物进行追踪,从而获取到目标的速度和追踪ID,用于后续进行目标轨迹预测。
2.1.7 消息转发(msg_adapter)
msg适配器模块用于在感知模块内部转发消息。
内部消息的通道名称通常有一个内部字段“inner”。 这些消息仅在线程之间传递,而不是在进程之间传递,因此您无法使用“cyber_monitor”来查看它们。 因为这些消息一般都比较大,比如图像、点云数据,为了避免复制、序列化和反序列化,我们采用直接传递对象的方法,所以这些消息只能在线程内传递。
为了方便调试,可以使用msg适配器模块转发消息,这样就可以通过cyber_monitor查看。而且单纯的激光雷达感知不需要进行传感器融合,因此需要通过msg_adapter模块进行消息转发输出,如果有多传感器融合模块,则需要启动激光雷达、相机和毫米波雷达模块加上融合模块才能输出最终的感知结果。
2.2 激光雷达感知参数介绍
接下来我们会介绍第一种感知开发模式:修改激光雷达感知模块参数。
2.2.1 参数目录结构
首先介绍各个组件的配置目录,以激光雷达检测模块为例
公共配置目录,多个组件的公共配置放到modules/perception/data路径下
modules/perception/data├── BUILD├── conf // 感知公共配置,例如一些单例├── cyberfile.xml├── flag // 感知模块所有的gflags命令行传入,用于dag├── models // 模型存放路径└── params // 传感器内外参
2.2.2 全局配置
gflag配置:modules/perception/common/perception_gflags.h
参数名 | 默认值 | 含义 |
obs_sensor_intrinsic_path | /apollo/modules/perception/data/params | 传感器内参路径 |
obs_sensor_meta_file | sensor_meta.pb.txt | 传感器meta文件名 |
enable_base_object_pool | enable_base_object_pool | 开启对象池 |
config_manager_path | ./ | 配置管理器路径 |
work_root | /apollo/modules/perception | 工作目录 |
onnx_obstacle_detector_model | /apollo/modules/perception/camera/lib/obstacle/detector/yolov4/model/yolov4_1_3_416_416.onnx | 目标检测模型 |
onnx_test_input_path | /apollo/modules/perception/inference/onnx/testdata/dog.jpg | 目标检测测试路径 |
onnx_test_input_name_file | /apollo/modules/perception/inference/onnx/testdata/coco.names | 目标检测测试文件 |
onnx_prediction_image_path | /apollo/modules/perception/inference/onnx/testdata/prediction.jpg | 目标检测预测图像路径 |
num_classes | 80 | 目标类型数量 |
torch_detector_model | /apollo/modules/perception/camera/lib/obstacle/detector/yolov4/model/yolov4.pt | torch检测模型路径 |
lidar_sensor_name | velodyne128 | lidar传感器名称 |
use_trt | false | 是否使用tensorrt |
trt_precision | 1 | tensorrt的精度,0: 32float,1: kInt8 |
trt_use_static | true | 是否从磁盘路径加载tensorrt图优化 |
use_calibration | true | 是否使用校正表 |
use_dynamicshape | true | 是否使用动态形状 |
collect_shape_info | true | 是否采集动态形状信息 |
dynamic_shape_file | /apollo/modules/perception/lidar_detection/data/center_point_paddle/pillar_20_0625/collect_shape_info_3lidar_20.pbtxt | 动态文件路径 |
object_template_file | object_template.pb.txt | 对象模版配置文件 |
hdmap_sample_step | 5 | 高精度地图采样率 |
scene_manager_file | scene_manager.conf | 场景管理器配置文件 |
roi_service_file | roi_service.conf | ROI服务配置文件 |
ground_service_file | ground_service.conf | 地面检测服务配置文件 |
modules/perception/common/onboard/common_flags/common_flags.h
参数名 | 默认值 | 含义 |
obs_enable_hdmap_input | true | 为 roi 过滤器启用 hdmap 输入 |
obs_enable_visualization | false | 是否发送可视化消息 |
obs_screen_output_dir | ./ | 输出目录,用于保存可视化屏幕截图 |
obs_benchmark_mode | false | 是否开启 benchmark 模式,默认 false |
obs_save_fusion_supplement | false | 是否保存融合补充数据,默认false |
start_visualizer | false |
2.2.3 点云预处理配置(pointcloud_preprocess)
pointcloud_preprocessor配置:
modules/perception/pointcloud_preprocess/data/pointcloud_preprocessor.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
bool | filter_naninf_points | true | 是否过滤nan点 |
bool | filter_nearby_box_points | true | 是否过滤自车周围的点(大小由以下4个值确定) |
float | box_forward_x | 1.0(米) | 自车imu到右边界距离 |
float | box_backward_x | -1.0(米) | 自车imu到左边界距离 |
float | box_forward_y | 2.0(米) | 自车imu到前边界距离 |
float | box_backward_y | -1.5(米) | 自车imu到后边界距离 |
bool | filter_high_z_points | true | 是否过滤超过高度阈值的点 |
float | z_threshold | 2.0(米) | 高度过滤阈值 |
2.2.4 高精度地图过滤(pointcloud_map_based_roi)
hdmap_roi_filter配置:
modules/perception/pointcloud_map_based_roi/data/hdmap_roi_filter.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
float | range | 120.0 | 基于LiDAR传感器点的2D网格ROI LUT的图层范围 |
float | cell_size | 0.25 | 用于量化2D网格的单元格的大小。 |
float | extend_dist | 0 | 外扩ROI边界的距离。 |
bool | no_edge_table | false | 是否有edge table |
bool | set_roi_service | true | 是否启用ROI Service |
map_manager配置:
modules/perception/pointcloud_map_based_roi/data/map_manager.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
bool | update_pose | false | 是否更新lidar到世界坐标系的位姿 |
float | roi_search_distance | 120.0(米) | ROI搜索的距离范围 |
2.2.5 地面检测(pointcloud_ground_detection)
spatio_temporal_ground_detector配置文件:
modules/perception/pointcloud_ground_detection/data/spatio_temporal_ground_detector.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
uint32 | grid_size | 16 | 网格size |
float | ground_thres | 0.25 | 地面高度阈值,低于则认为是地面 |
float | roi_rad_x | 120.0 | x方向roi radius |
float | roi_rad_y | 120.0 | y方向roi radius |
float | roi_rad_z | 100.0 | z反向roi radius |
uint32 | nr_smooth_iter | 5 | smooth迭代次数 |
bool | use_roi | true | 是否用roi内的点云 |
bool | use_ground_service | true | 是否用ground service |
2.2.6 3D目标检测(lidar_detection)
此模块配置文件路径:
- modules/perception/lidar_detection/conf
- modules/perception/lidar_detection/data
ModelInfo配置,文件路径:modules/perception/common/proto/model_info.proto
参数类型 | 参数名 | 默认值 | 含义 |
string | name | / | 模型名称,同models/下文件夹名 |
string | framework | / | 模型推理框架 |
string | ModelFile.proto_file | / | 模型网络结构 |
string | ModelFile.weight_file | / | 模型权重文件 |
string | ModelFile.anchors_file | / | anchor size |
string | ModelBlob.inputs | / | 模型输入数据名称及维度 |
int32 | ModelBlob.outputs | / | 模型输出数据名称及维度 |
PointCloudPreProcess:
参数类型 | 参数名 | 默认值 | 含义 |
int32 | gpu_id | 0 | GPU的id |
double | normalizing_factor | 255 | 强度归一化的缩放因子 |
int32 | num_point_feature | 4 | 每个点的特征数量 |
bool | enable_ground_removal | false | 是否过滤掉地面点 |
double | ground_removal_height | -1.5 | 过滤掉z值小于阈值的点 |
bool | enable_downsample_beams | false | 是否根据beam id对点云进行过滤 |
int32 | downsample_beams_factor | 4 | 保留beam id为downsample_beams_factor的倍数的点云 |
bool | enable_downsample_pointcloud | false | 是否根据voxel过滤点云 |
double | downsample_voxel_size_x | 0.01 | 过滤时voxel的x方向长度 |
double | downsample_voxel_size_y | 0.01 | 过滤时voxel的y方向长度 |
double | downsample_voxel_size_z | 0.01 | 过滤时voxel的z方向长度 |
bool | enable_fuse_frames | false | 是否融合多帧点云 |
int32 | num_fuse_frames | 5 | 融合点云的帧数 |
double | fuse_time_interval | 0.5 | 融合点云的时间间隔 |
bool | enable_shuffle_points | false | 是否打乱点云索引 |
int32 | max_num_points | 2147483647 | 允许的最大点云数量 |
bool | reproduce_result_mode | false | 是否开启复现结果模式 |
bool | enable_roi_outside_removal | false | 是否在输入模型之前将roi外的点云进行过滤 |
PointCloudPostProcess
参数类型 | 参数名 | 默认值 | 含义 |
float | score_threshold | 0.5 | 置信度阈值 |
float | nms_overlap_threshold | 0.5 | NMS的iou阈值 |
int32 | num_output_box_feature | 7 | 输出障碍物的属性个数 |
float | bottom_enlarge_height | 0.25 | 获取目标真实点云时向上扩充的范围 |
float | top_enlarge_height | 0.25 | 获取目标真实点云时向下扩充的范围 |
float | width_enlarge_value | 0 | 获取目标真实点云时宽度扩充的范围 |
float | length_enlarge_value | 0 | 获取目标真实点云时长度扩充的范围 |
cnnseg配置
modules/perception/lidar_detection/detector/cnn_segmentation/proto/model_param.proto
参数类型 | 参数名 | 默认值 | 含义 | |
ModelInfo | info | / | 模型基本配置 | |
FeatureParam | float | point_cloud_range | 90 | 点云范围 |
uint32 | width | 864 | BEV宽度 | |
uint32 | height | 864 | BEV高度 | |
float | min_height | -5.0 | 点云z值最小值 | |
float | max_height | 5.0 | 点云z值最大值 | |
bool | use_intensity_feature | true | 是否使用强度特征 | |
bool | use_constant_feature | false | 是否使用常数特征 | |
bool | do_classification | true | 是否预测分类信息 | |
bool | do_heading | true | 是否预测朝向角信息 | |
PointCloudPreProcess | preprocess | / | 预处理信息 | |
SppEngineConfig | float | height_gap | 0.5 | 高度差距 |
bool | remove_ground_points | true | 是否过滤掉障碍物中的地面点 | |
float | objectness_thresh | 0.5 | objectness的阈值 | |
float | confidence_thresh | 0.1 | confidence的阈值 | |
float | height_thresh | 0.5 | 高度阈值 | |
uint32 | min_pts_num | 3 | 目标最少点数 | |
float | confidence_range | 85 | 置信度范围 | |
bool | fill_recall_with_segmentor | true | 是否使用背景分割 | |
centerpoint配置:
modules/perception/lidar_detection/data/center_point_param.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
ModelInfo | info | / | 模型通用配置 |
PointCloudPreProcess | preprocess | / | 预处理 |
PointCloudPostProcess | postprocess | / | 后处理 |
int32 | point2box_max_num | 5 | 每个点最多可以属于多少个box |
float | quantize | 0.2 |
2.2.7 检测结果过滤(lidar_detection_filter)
background_filter配置:
modules/perception/lidar_detection_filter/data/background_filter.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
float | outside_roi_filter_distance | 1.0 | 在车道线之外的距离阈值 |
roi_boundary_filter配置:
modules/perception/lidar_detection_filter/data/roi_boundary_filter.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
float | distance_to_boundary_threshold | 2.5 | 障碍物在车道线外时,距离车道线边界的阈值, 大于该阈值则被删除 |
float | confidence_threshold | 0.0 | 目标置信度阈值 |
float | cross_roi_threshold | 0.6 | 目标是否在roi交界处的阈值 |
float | inside_threshold | -1.0 | 障碍物在车道线内时,距离车道线边界的阈值, |
2.2.8 目标追踪(lidar_tracking)
fused_classifer
fused_classifier配置文件:
modules/perception/lidar_tracking/data/fused_classifier/fused_classifier.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
float | temporal_window | 20.0 | 时间窗口 |
bool | enable_temporal_fusion | true | 是否开启时间融合 |
string | one_shot_fusion_method | CCRFOneShotTypeFusion | one shot fusion方法 |
string | sequence_fusion_method | CCRFSequenceTypeFusion | sequence fusion方法 |
bool | use_tracked_objects | true | 是否使用跟踪的目标 |
ccrf_type_fusion配置文件:
参数类型 | 参数名 | 默认值 | 含义 |
string | classifiers_property_file_path | null | 分类属性文件路径 |
string | transition_property_file_path | null | 转移属性文件路径 |
float | transition_matrix_alpha | 1.8 | 转移矩阵alpha参数 |
tracker
mlf_engine配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_engine.pb.txt
参数类型 | 参数名 | 默认值 | 含义 |
string | main_sensor | / | 主传感器 |
bool | use_histogram_for_match | true | 是否用histogram用来做匹配 |
uint32 | histogram_bin_size | 10 | histogram的大小 |
bool | output_predict_objects | false | 是否输出预测目标 |
double | reserved_invisible_time | 0.2 | 保留不可见时间 |
bool | use_frame_timestamp | false | 是否用frame时间戳 |
mlf_track_object_matcher配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_track_object_matcher.conf
参数类型 | 参数名 | 默认值 | 含义 |
string | foreground_mathcer_method | MultiHmBipartiteGraphMatcher | 前景目标匹配方法 |
string | background_matcher_method | GnnBipartiteGraphMatcher | 背景目标匹配方法 |
float | bound_value | 100.0 | 边界值 |
float | max_match_distance | 4.0 | 最大匹配距离 |
mlf_track_object_distance配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_track_object_distance.conf
参数类型 | 参数名 | 默认值 | 含义 |
string | sensor_name_pair | null | 传感器名称pair |
float | location_dist_weight | 0 | 位置距离权重 |
float | direction_dist_weight | 0 | 方向距离权重 |
float | bbox_size_dist_weight | 0 | bbox大小距离权重 |
float | point_num_dist_weight | 0 | 目标点云数量距离权重 |
float | histogram_dist_weight | 0 | 统计直方图距离权重 |
float | centroid_shift_dist_weight | 0 | 中心点偏移距离权重 |
float | bbox_iou_dist_weight | 0 | bbox iou距离权重 |
float | semantic_map_dist_weight | 0 | 语义图距离权重 |
mlf_tracker配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_tracker.conf
参数类型 | 参数名 | 默认值 | 含义 |
string | filter_name | / | filter名称 |
mlf_motion_filter配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_motion_filter.conf
参数类型 | 参数名 | 默认值 | 含义 |
bool | use_adaptive | true | 是否用自适应方法 |
bool | use_breakdown | true | 是否使用breakdown |
bool | use_convergence_boostup | true | 是否用收敛启动 |
double | init_velocity_variance | 5.0 | 速度方差初始参数 |
double | init_acceleration_variance | 10.0 | 加速度方差初始参数 |
double | measured_velocity_variance | 0.4 | 速度方差测量参数 |
double | predict_variance_per_sqrsec | 1.0 | 预测方差参数 |
uint32 | boostup_history_size_minimum | 3 | 历史最小值初始化参数 |
uint32 | boostup_history_size_maximum | 6 | 历史最大值初始化参数 |
double | converged_confidence_minimum | 0.5 | 最小收敛置信度参数 |
double | noise_maximum | 0.1 | 最大噪声参数 |
double | trust_orientation_range | 40 | 方向范围信任参数 |
mlf_motion_refiner配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_motion_refiner.conf
参数类型 | 参数名 | 默认值 | 含义 |
double | claping_acceleration_threshold | 10.0 | 加速度截断阈值 |
double | claping_speed_threshold | 1.0 | 速度截断阈值 |
mlf_shape_filter配置文件:
modules/perception/lidar_tracking/data/tracking/mlf_shape_filter.conf
参数类型 | 参数名 | 默认值 | 含义 |
double | bottom_points_ignore_threshold | 0.1 | 底部点云忽略阈值 |
double | top_points_ignore_threshold | 1.6 | 头部点云忽略阈值 |
2.2.9 消息转发(msg_adapter)
modules/perception/msg_adapter/common/msg_adapter_gflags.h
参数名 | 默认值 | 含义 |
cameraframe_to_obstacles_in | /fake_topic | cameraframe输入 |
cameraframe_to_obstacles_out | /apollo/perception/obstacles | cameraframe转obstacles输出 |
sensorframe_message_to_obstacles_in | /fake_topic | sensorframe_message输入 |
sensorframe_message_to_obstacles_out | /apollo/perception/obstacles | sensorframe_message转obstacles输出 |
lidarframe_to_obstacles_in | /fake_topic | lidarframe输入 |
lidarframe_to_obstacles_out | /apollo/perception/obstacles |
2.3 激光雷达感知参数开发模式
2.3.1 进入Docker环境
# 进入容器aem enter# 下载安装依赖包: 会拉取安装core目录下的cyberfile.xml里面所有的依赖包buildtool build --gpu
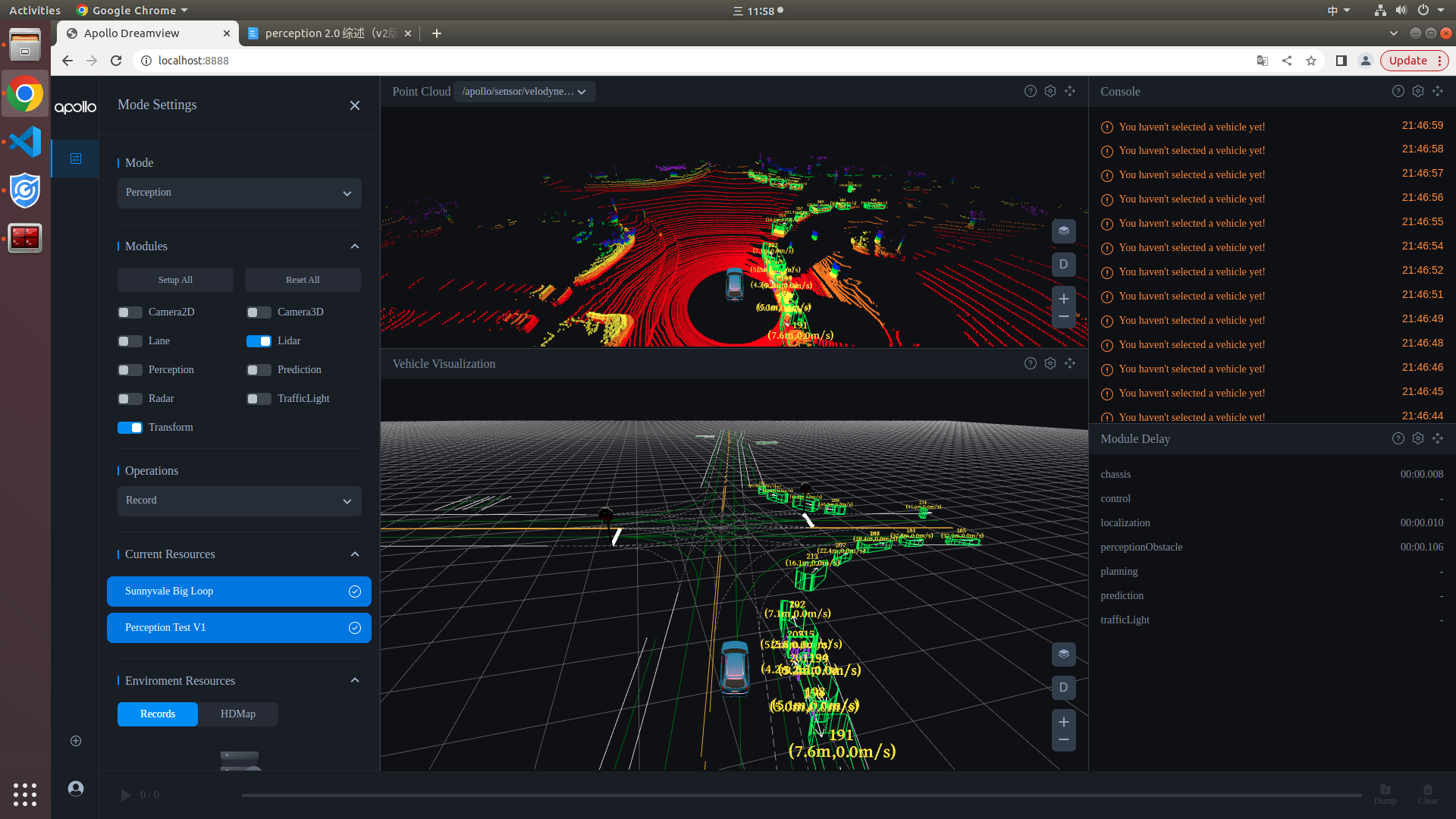
2.3.2 启动Dreamview
aem bootstrap start --plus
plus参数指的是启动dreamview 2.0,如需启动老版本dreamview,去掉--plus参数即可
2.3.3 查看感知模型
通过amodel命令查看当前系统中已经安装的感知模型。
amodel list
2.3.4 修改参数
2.3.4.1 修改模型输出置信度
通过调整模型输出置信度,学习如何调整模型的检测结果输出。模型的置信度越高,检测的结果越准确,但召回率会变低,模型的置信度变低,召回率变高,准确率变低,因此要平衡准确率和召回率,来达到一个比较好的效果。
首先检查/apollo/modules/perception/lidar_detection/conf/lidar_detection_config.pb.txt中的配置是否为CenterPointDetection
plugin_param {name: "CenterPointDetection"config_path: "perception/lidar_detection/data"config_file: "center_point_param.pb.txt"}
然后再/apollo/modules/perception/lidar_detection/data/center_point_param.pb.txt修改score_threshold
postprocess {score_threshold: 0.25 // 检测结果置信度num_output_box_feature: 7bottom_enlarge_height: 0.1 // 0.25 -> 0.1top_enlarge_height: 0.25width_enlarge_value: 0length_enlarge_value: 0}

2.3.4.2 修改ROI范围
修改ROI参数可以通过规则过滤不需要关注的障碍物,避免对自动驾驶汽车的干扰。
找到/apollo/modules/perception/lidar_detection_filter/data/roi_boundary_filter.pb.txt文件,修改参数
distance_to_boundary_threshold: 0.0confidence_threshold: 0.0cross_roi_threshold: 0.6inside_threshold: -1.0

2.3.5 启动lidar感知程序
选择相应车型配置
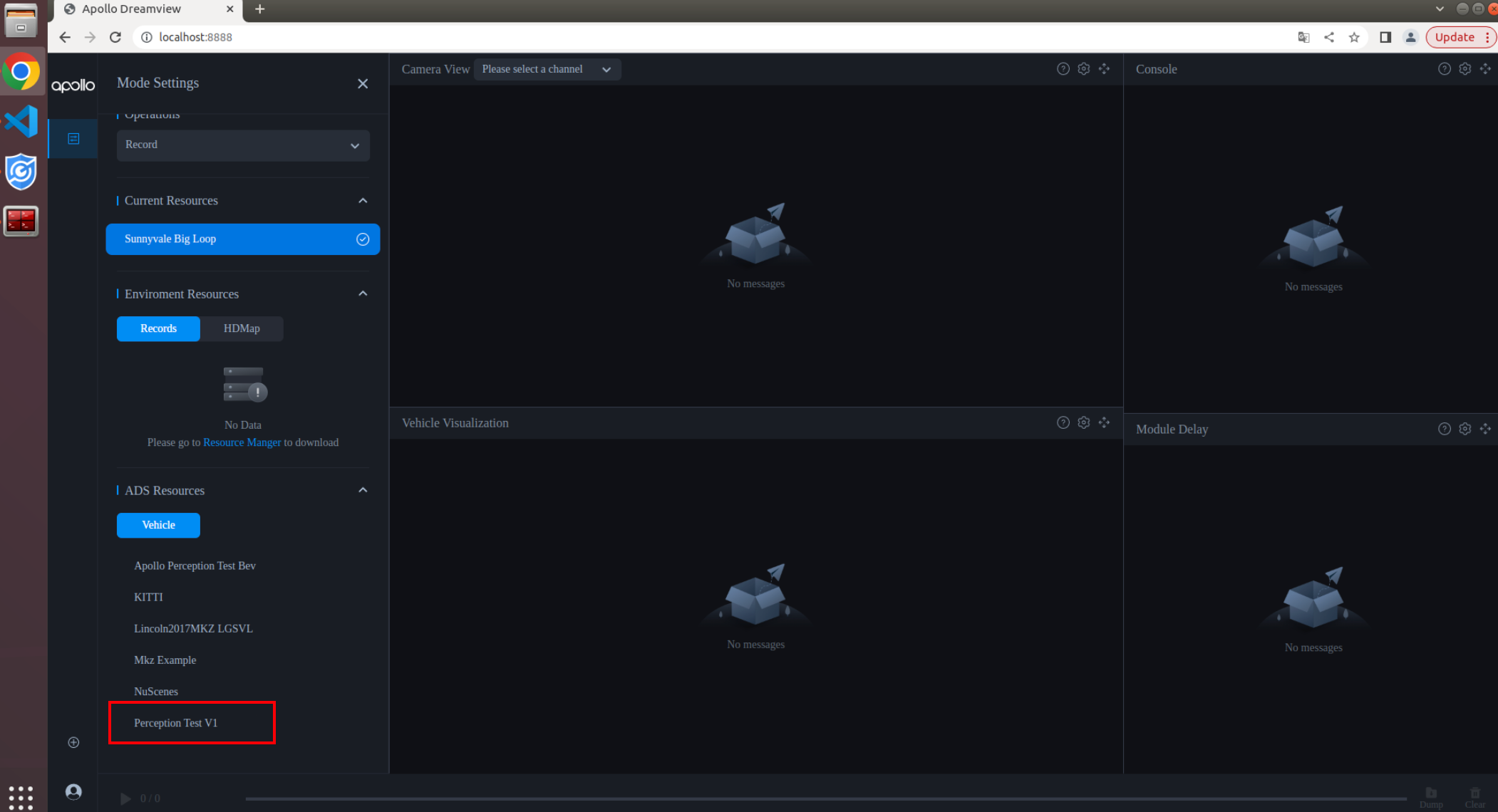
启动transform模块
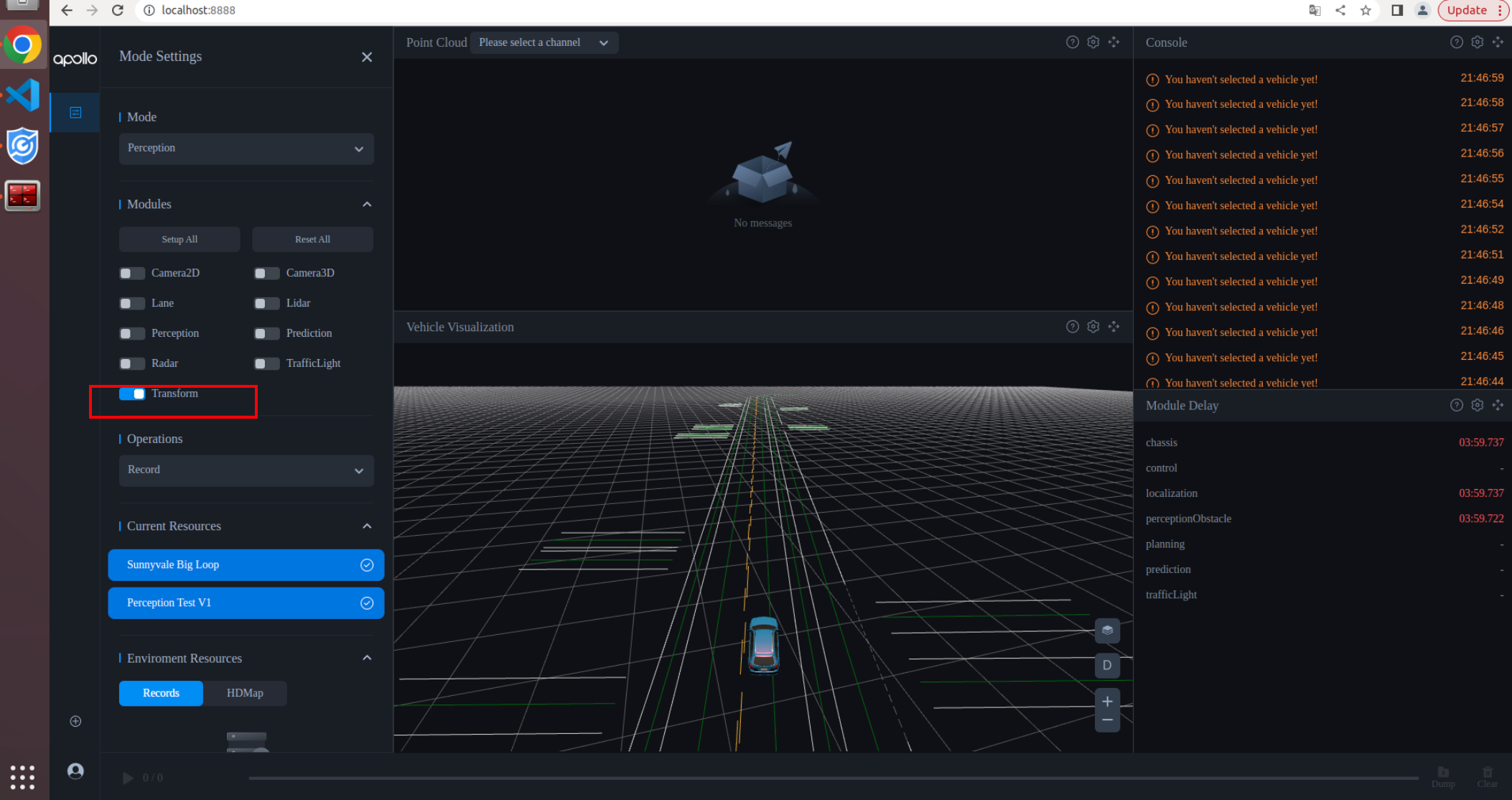
启动lidar感知模块

下载并播放感知包,在dreamview左下角点击resource manger,下载sensorrgb数据包,下载完成后选择sensorrgb数据包点击播放。
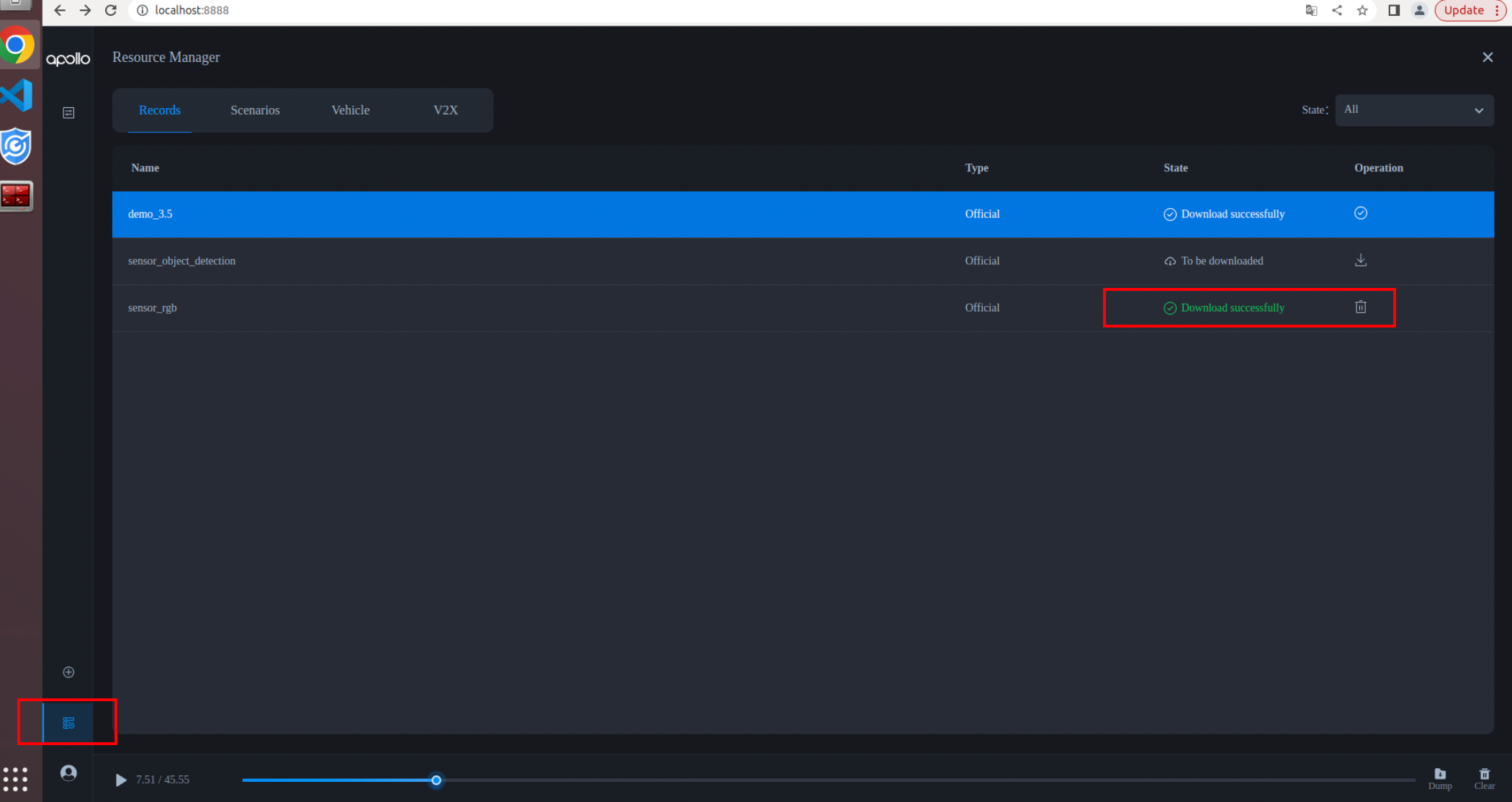
dreamview查看lidar检测结果